Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDynamic Manipulation of Flexible Objects with Torque Sequence Using a Deep Neural Network
Paper and Code
Jan 29, 2019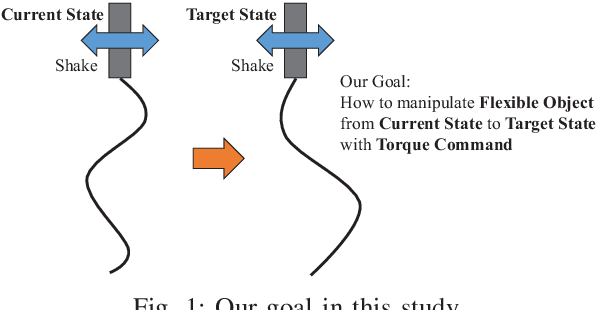
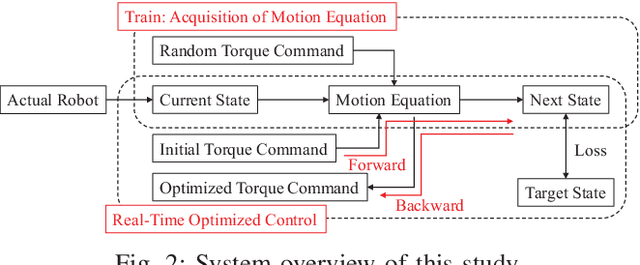
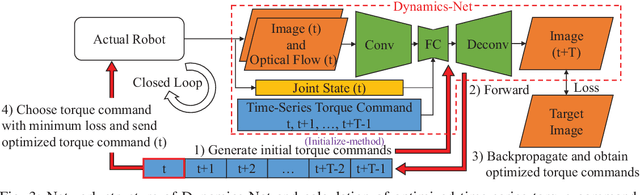
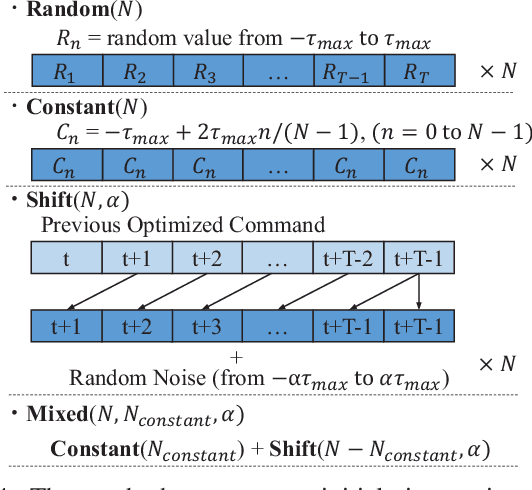
For dynamic manipulation of flexible objects, we propose an acquisition method of a flexible object motion equation model using a deep neural network and a control method to realize a target state by calculating an optimized time-series joint torque command. By using the proposed method, any physics model of a target object is not needed, and the object can be controlled as intended. We applied this method to manipulations of a rigid object, a flexible object with and without environmental contact, and a cloth, and verified its effectiveness.
View paper on