 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMFMAN-YOLO: A Method for Detecting Pole-like Obstacles in Complex Environment
Jul 24, 2023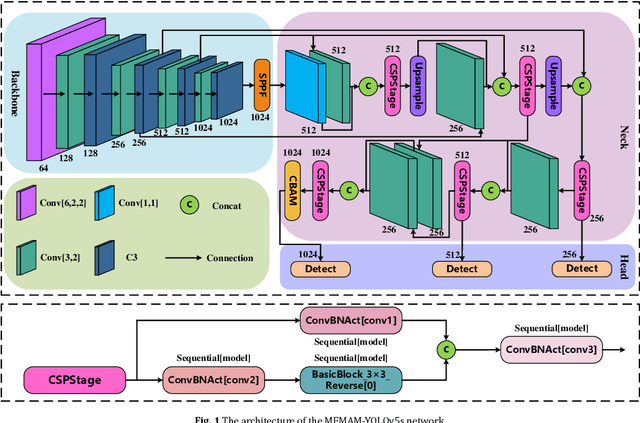
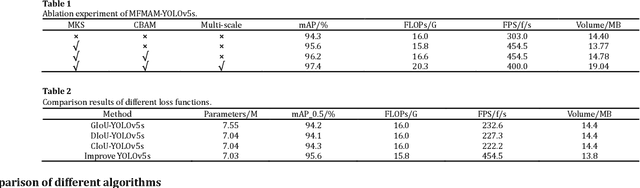
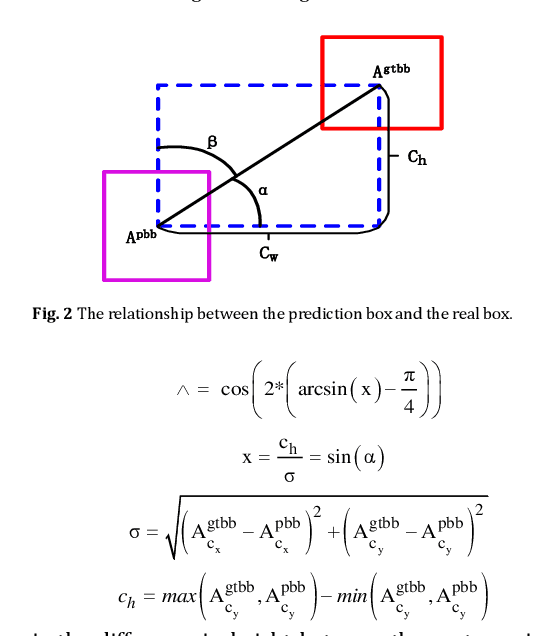
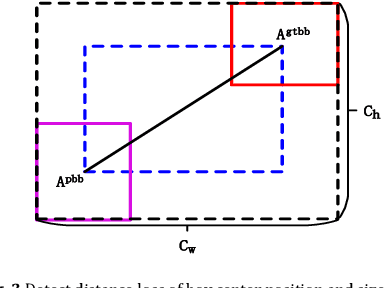
In real-world traffic, there are various uncertainties and complexities in road and weather conditions. To solve the problem that the feature information of pole-like obstacles in complex environments is easily lost, resulting in low detection accuracy and low real-time performance, a multi-scale hybrid attention mechanism detection algorithm is proposed in this paper. First, the optimal transport function Monge-Kantorovich (MK) is incorporated not only to solve the problem of overlapping multiple prediction frames with optimal matching but also the MK function can be regularized to prevent model over-fitting; then, the features at different scales are up-sampled separately according to the optimized efficient multi-scale feature pyramid. Finally, the extraction of multi-scale feature space channel information is enhanced in complex environments based on the hybrid attention mechanism, which suppresses the irrelevant complex environment background information and focuses the feature information of pole-like obstacles. Meanwhile, this paper conducts real road test experiments in a variety of complex environments. The experimental results show that the detection precision, recall, and average precision of the method are 94.7%, 93.1%, and 97.4%, respectively, and the detection frame rate is 400 f/s. This research method can detect pole-like obstacles in a complex road environment in real time and accurately, which further promotes innovation and progress in the field of automatic driving.