 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeiGibson, a Simulation Environment for Interactive Tasks in Large Realistic Scenes
Dec 08, 2020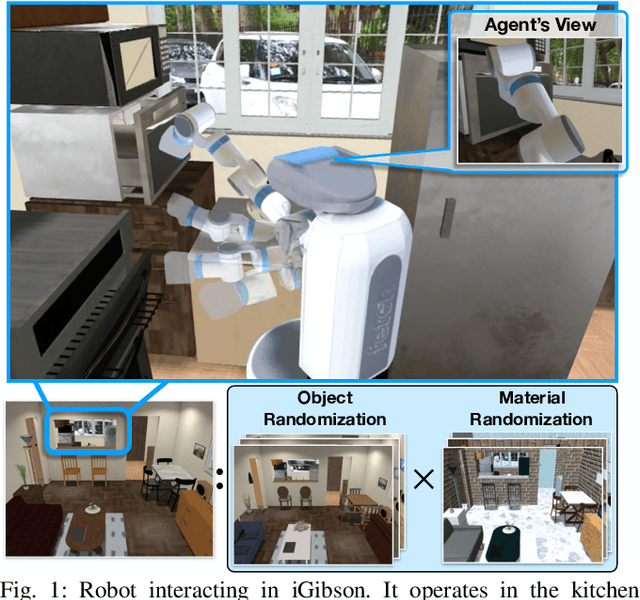
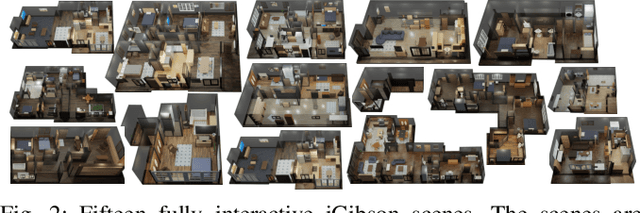
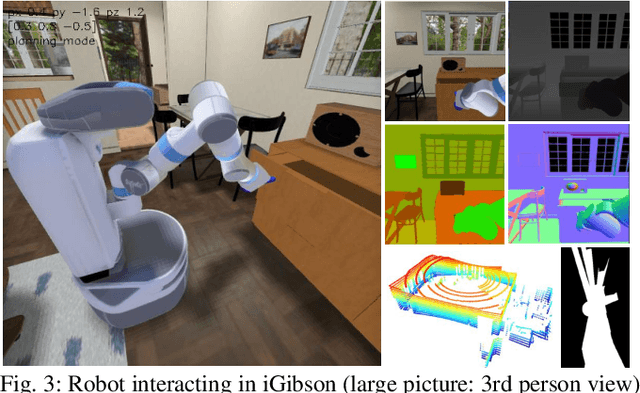
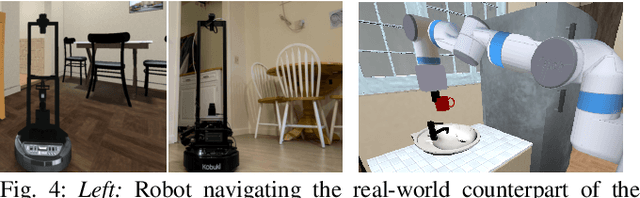
We present iGibson, a novel simulation environment to develop robotic solutions for interactive tasks in large-scale realistic scenes. Our environment contains fifteen fully interactive home-sized scenes populated with rigid and articulated objects. The scenes are replicas of 3D scanned real-world homes, aligning the distribution of objects and layout to that of the real world. iGibson integrates several key features to facilitate the study of interactive tasks: i) generation of high-quality visual virtual sensor signals (RGB, depth, segmentation, LiDAR, flow, among others), ii) domain randomization to change the materials of the objects (both visual texture and dynamics) and/or their shapes, iii) integrated sampling-based motion planners to generate collision-free trajectories for robot bases and arms, and iv) intuitive human-iGibson interface that enables efficient collection of human demonstrations. Through experiments, we show that the full interactivity of the scenes enables agents to learn useful visual representations that accelerate the training of downstream manipulation tasks. We also show that iGibson features enable the generalization of navigation agents, and that the human-iGibson interface and integrated motion planners facilitate efficient imitation learning of simple human demonstrated behaviors. iGibson is open-sourced with comprehensive examples and documentation. For more information, visit our project website: http://svl.stanford.edu/igibson/