 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Generic Multi-Projection-Center Model and Calibration Method for Light Field Cameras
Aug 07, 2018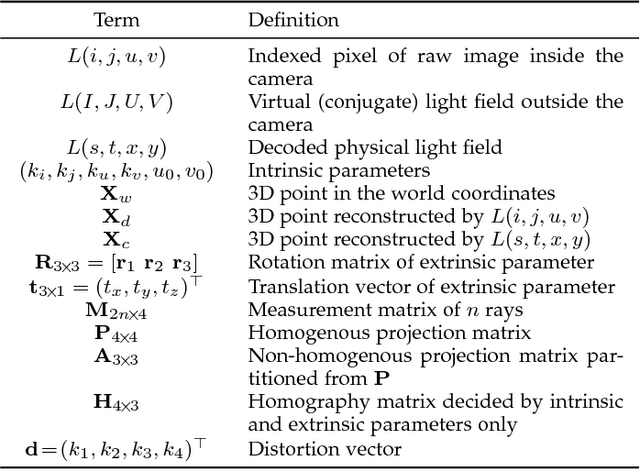
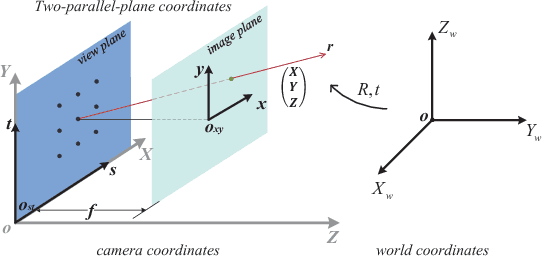


Light field cameras can capture both spatial and angular information of light rays, enabling 3D reconstruction by a single exposure. The geometry of 3D reconstruction is affected by intrinsic parameters of a light field camera significantly. In the paper, we propose a multi-projection-center (MPC) model with 6 intrinsic parameters to characterize light field cameras based on traditional two-parallel-plane (TPP) representation. The MPC model can generally parameterize light field in different imaging formations, including conventional and focused light field cameras. By the constraints of 4D ray and 3D geometry, a 3D projective transformation is deduced to describe the relationship between geometric structure and the MPC coordinates. Based on the MPC model and projective transformation, we propose a calibration algorithm to verify our light field camera model. Our calibration method includes a close-form solution and a non-linear optimization by minimizing re-projection errors. Experimental results on both simulated and real scene data have verified the performance of our algorithm.
Unconstrained Two-parallel-plane Model for Focused Plenoptic Cameras Calibration
Aug 16, 2016



The plenoptic camera can capture both angular and spatial information of the rays, enabling 3D reconstruction by single exposure. The geometry of the recovered scene structure is affected by the calibration of the plenoptic camera significantly. In this paper, we propose a novel unconstrained two-parallel-plane (TPP) model with 7 parameters to describe a 4D light field. By reconstructing scene points from ray-ray association, a 3D projective transformation is deduced to establish the relationship between the scene structure and the TPP parameters. Based on the transformation, we simplify the focused plenoptic camera as a TPP model and calibrate its intrinsic parameters. Our calibration method includes a close-form solution and a nonlinear optimization by minimizing re-projection error. Experiments on both simulated data and real scene data verify the performance of the calibration on the focused plenoptic camera.