 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGoal-Space Planning with Subgoal Models
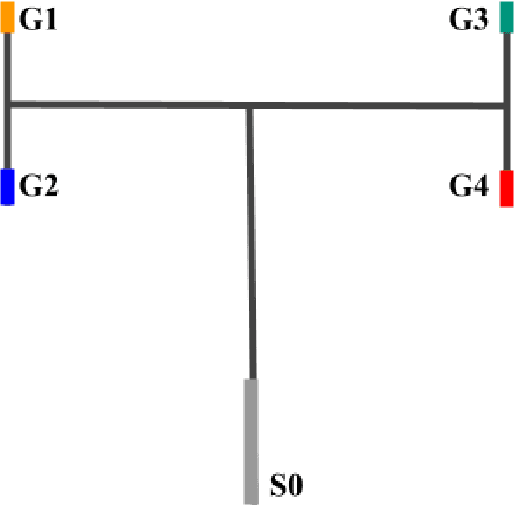
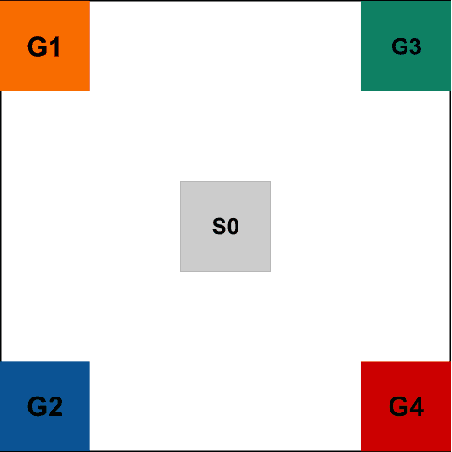
Jun 08, 2022This paper investigates a new approach to model-based reinforcement learning using background planning: mixing (approximate) dynamic programming updates and model-free updates, similar to the Dyna architecture. Background planning with learned models is often worse than model-free alternatives, such as Double DQN, even though the former uses significantly more memory and computation. The fundamental problem is that learned models can be inaccurate and often generate invalid states, especially when iterated many steps. In this paper, we avoid this limitation by constraining background planning to a set of (abstract) subgoals and learning only local, subgoal-conditioned models. This goal-space planning (GSP) approach is more computationally efficient, naturally incorporates temporal abstraction for faster long-horizon planning and avoids learning the transition dynamics entirely. We show that our GSP algorithm can learn significantly faster than a Double DQN baseline in a variety of situations.
Continual Auxiliary Task Learning
Feb 22, 2022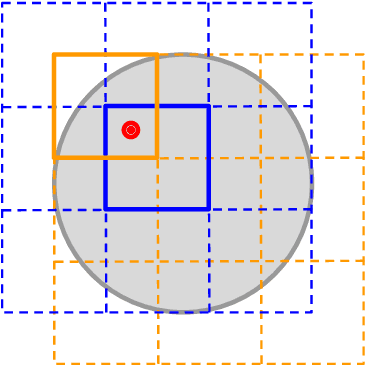

Learning auxiliary tasks, such as multiple predictions about the world, can provide many benefits to reinforcement learning systems. A variety of off-policy learning algorithms have been developed to learn such predictions, but as yet there is little work on how to adapt the behavior to gather useful data for those off-policy predictions. In this work, we investigate a reinforcement learning system designed to learn a collection of auxiliary tasks, with a behavior policy learning to take actions to improve those auxiliary predictions. We highlight the inherent non-stationarity in this continual auxiliary task learning problem, for both prediction learners and the behavior learner. We develop an algorithm based on successor features that facilitates tracking under non-stationary rewards, and prove the separation into learning successor features and rewards provides convergence rate improvements. We conduct an in-depth study into the resulting multi-prediction learning system.