 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEnhancing Robustness of Indoor Robotic Navigation with Free-Space Segmentation Models Against Adversarial Attacks
Feb 13, 2024Endeavors in indoor robotic navigation rely on the accuracy of segmentation models to identify free space in RGB images. However, deep learning models are vulnerable to adversarial attacks, posing a significant challenge to their real-world deployment. In this study, we identify vulnerabilities within the hidden layers of neural networks and introduce a practical approach to reinforce traditional adversarial training. Our method incorporates a novel distance loss function, minimizing the gap between hidden layers in clean and adversarial images. Experiments demonstrate satisfactory performance in improving the model's robustness against adversarial perturbations.
Depth-guided Free-space Segmentation for a Mobile Robot
Nov 03, 2023



Accurate indoor free-space segmentation is a challenging task due to the complexity and the dynamic nature that indoor environments exhibit. We propose an indoors free-space segmentation method that associates large depth values with navigable regions. Our method leverages an unsupervised masking technique that, using positive instances, generates segmentation labels based on textural homogeneity and depth uniformity. Moreover, we generate superpixels corresponding to areas of higher depth and align them with features extracted from a Dense Prediction Transformer (DPT). Using the estimated free-space masks and the DPT feature representation, a SegFormer model is fine-tuned on our custom-collected indoor dataset. Our experiments demonstrate sufficient performance in intricate scenarios characterized by cluttered obstacles and challenging identification of free space.
A Survey of Traversability Estimation for Mobile Robots
Apr 22, 2022
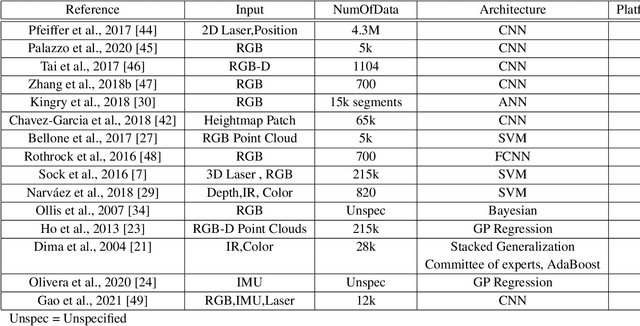


Traversability illustrates the difficulty of driving through a specific region and encompasses the suitability of the terrain for traverse based on its physical properties, such as slope and roughness, surface condition, etc. In this survey we highlight the merits and limitations of all the major steps in the evolution of traversability estimation techniques, covering both non-trainable and machine-learning methods, leading up to the recent proliferation of deep learning literature. We discuss how the nascence of Deep Learning has created an opportunity for radical improvement in traversability estimation. Finally, we discuss how self-supervised learning can help satisfy deep methods' increased need for (challenging to acquire and label) large-scale datasets.