 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDynamic and Distributed Optimization for the Allocation of Aerial Swarm Vehicles
Nov 30, 2022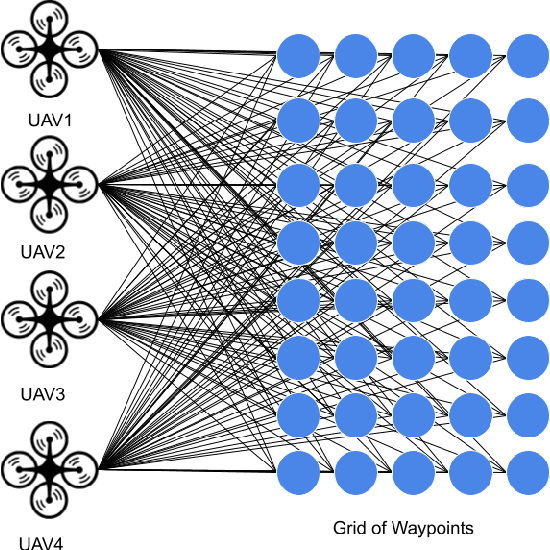
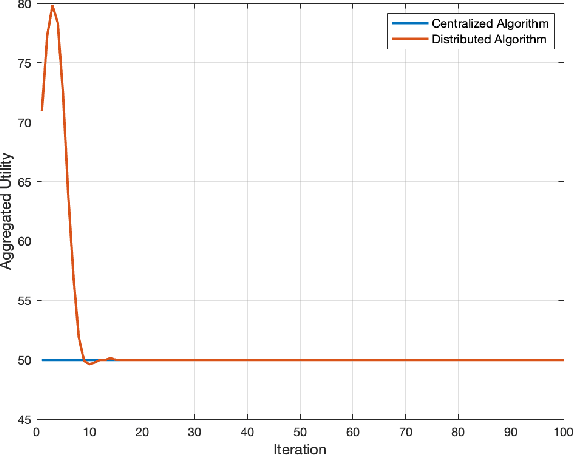
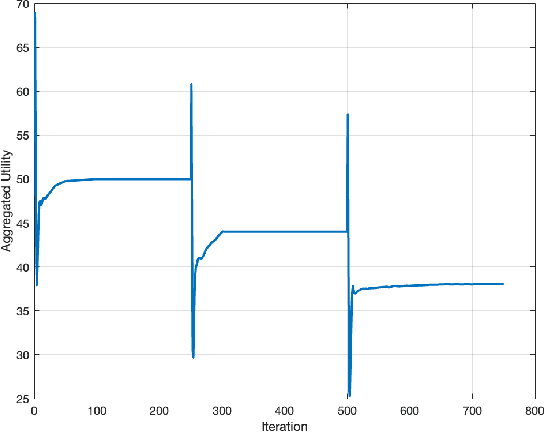
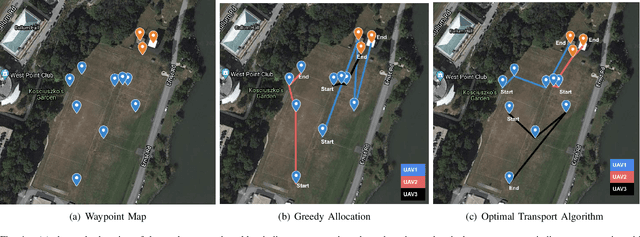
Optimal transport (OT) is a framework that can guide the design of efficient resource allocation strategies in a network of multiple sources and targets. This paper applies discrete OT to a swarm of UAVs in a novel way to achieve appropriate task allocation and execution. Drone swarm deployments already operate in multiple domains where sensors are used to gain knowledge of an environment [1]. Use cases such as, chemical and radiation detection, and thermal and RGB imaging create a specific need for an algorithm that considers parameters on both the UAV and waypoint side and allows for updating the matching scheme as the swarm gains information from the environment. Additionally, the need for a centralized planner can be removed by using a distributed algorithm that can dynamically update based on changes in the swarm network or parameters. To this end, we develop a dynamic and distributed OT algorithm that matches a UAV to the optimal waypoint based on one parameter at the UAV and another parameter at the waypoint. We show the convergence and allocation of the algorithm through a case study and test the algorithm's effectiveness against a greedy assignment algorithm in simulation.
A Monte Carlo Approach to Closing the Reality Gap
May 08, 2020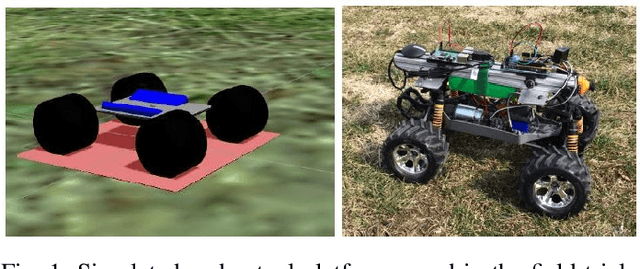
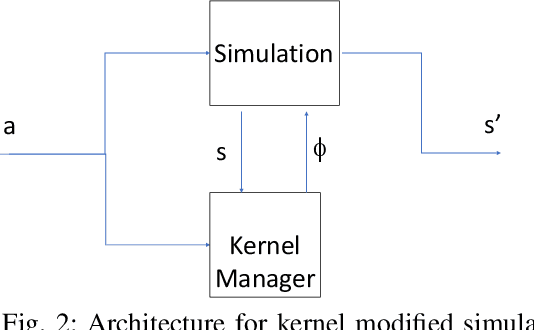
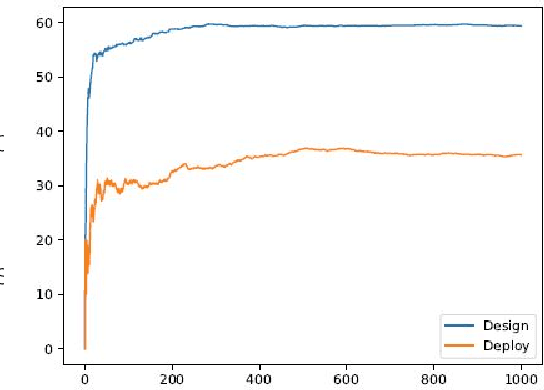
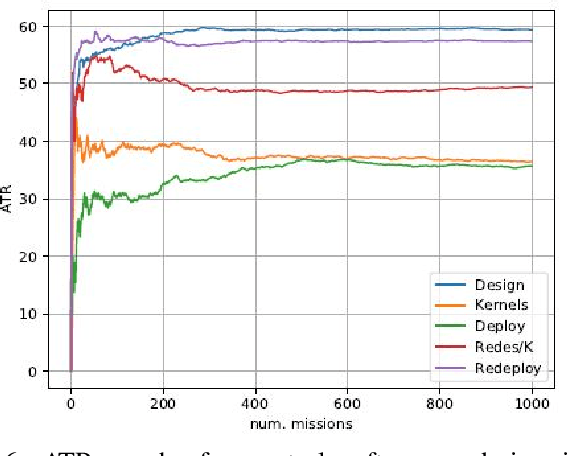
We propose a novel approach to the 'reality gap' problem, i.e., modifying a robot simulation so that its performance becomes more similar to observed real world phenomena. This problem arises whether the simulation is being used by human designers or in an automated policy development mechanism. We expect that the program/policy is developed using simulation, and subsequently deployed on a real system. We further assume that the program includes a monitor procedure with scalar output to determine when it is achieving its performance objectives. The proposed approach collects simulation and real world observations and builds conditional probability functions. These are used to generate paired roll-outs to identify points of divergence in behavior. These are used to generate {\it state-space kernels} that coerce the simulation into behaving more like observed reality. The method was evaluated using ROS/Gazebo for simulation and a heavily modified Traaxas platform in outdoor deployment. The results support not just that the kernel approach can force the simulation to behave more like reality, but that the modification is such that an improved control policy tested in the modified simulation also performs better in the real world.