 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMultiple chaotic central pattern generators with learning for legged locomotion and malfunction compensation
Jul 11, 2014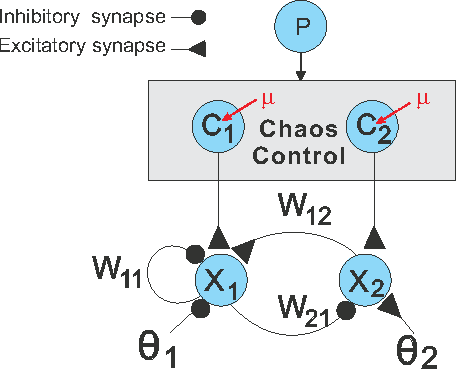

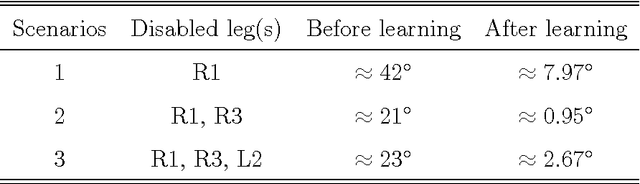

An originally chaotic system can be controlled into various periodic dynamics. When it is implemented into a legged robot's locomotion control as a central pattern generator (CPG), sophisticated gait patterns arise so that the robot can perform various walking behaviors. However, such a single chaotic CPG controller has difficulties dealing with leg malfunction. Specifically, in the scenarios presented here, its movement permanently deviates from the desired trajectory. To address this problem, we extend the single chaotic CPG to multiple CPGs with learning. The learning mechanism is based on a simulated annealing algorithm. In a normal situation, the CPGs synchronize and their dynamics are identical. With leg malfunction or disability, the CPGs lose synchronization leading to independent dynamics. In this case, the learning mechanism is applied to automatically adjust the remaining legs' oscillation frequencies so that the robot adapts its locomotion to deal with the malfunction. As a consequence, the trajectory produced by the multiple chaotic CPGs resembles the original trajectory far better than the one produced by only a single CPG. The performance of the system is evaluated first in a physical simulation of a quadruped as well as a hexapod robot and finally in a real six-legged walking machine called AMOSII. The experimental results presented here reveal that using multiple CPGs with learning is an effective approach for adaptive locomotion generation where, for instance, different body parts have to perform independent movements for malfunction compensation.