 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTOKCS: Tool for Organizing Key Characteristics of VAM-HRI Systems
Aug 07, 2021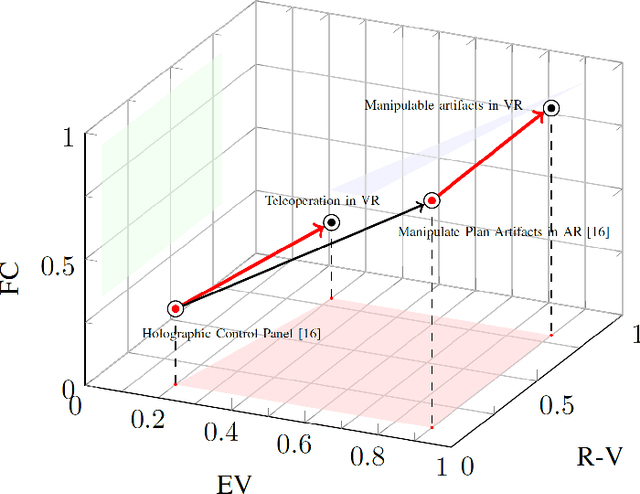


Frameworks have begun to emerge to categorize Virtual, Augmented, and Mixed Reality (VAM) technologies that provide immersive, intuitive interfaces to facilitate Human-Robot Interaction. These frameworks, however, fail to capture key characteristics of the growing subfield of VAM-HRI and can be difficult to consistently apply. This work builds upon these prior frameworks through the creation of a Tool for Organizing Key Characteristics of VAM-HRI Systems (TOKCS). TOKCS discretizes the continuous scales used within prior works for more consistent classification and adds additional characteristics related to a robot's internal model, anchor locations, manipulability, and the system's software and hardware. To showcase the tool's capability, TOKCS is applied to find trends and takeaways from the fourth VAM-HRI workshop. These trends highlight the expressive capability of TOKCS while also helping frame newer trends and future work recommendations for VAM-HRI research.