 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSublinear-Time Reconfiguration of Programmable Matter with Joint Movements
Mar 11, 2026We study centralized reconfiguration problems for geometric amoebot structures. A set of $n$ amoebots occupy nodes on the triangular grid and can reconfigure via expansion and contraction operations. We focus on the joint movement extension, where amoebots may expand and contract in parallel, enabling coordinated motion of larger substructures. Prior work introduced this extension and analyzed reconfiguration under additional assumptions such as metamodules. In contrast, we investigate the intrinsic dynamics of reconfiguration without such assumptions by restricting attention to centralized algorithms, leaving distributed solutions for future work. We study the reconfiguration problem between two classes of amoebot structures $A$ and $B$: For every structure $S\in A$, the goal is to compute a schedule that reconfigures $S$ into some structure $S'\in B$. Our focus is on sublinear-time algorithms. We affirmatively answer the open problem by Padalkin et al. (Auton. Robots, 2025) whether a within-the-model sublinear-time universal reconfiguration algorithm is possible, by proving that any structure can be reconfigured into a canonical line-segment structure in $O(\sqrt{n}\log n)$ rounds. Additionally, we give a constant-time algorithm for reconfiguring any spiral structure into a line segment. These results are enabled by new constant-time primitives that facilitate efficient parallel movement. Our findings demonstrate that the joint movement model supports sublinear reconfiguration without auxiliary assumptions. A central open question is whether universal reconfiguration within this model can be achieved in polylogarithmic or even constant time.
Shape Formation and Locomotion with Joint Movements in the Amoebot Model
May 10, 2023



We are considering the geometric amoebot model where a set of $n$ amoebots is placed on the triangular grid. An amoebot is able to send information to its neighbors, and to move via expansions and contractions. Since amoebots and information can only travel node by node, most problems have a natural lower bound of $\Omega(D)$ where $D$ denotes the diameter of the structure. Inspired by the nervous and muscular system, Feldmann et al. have proposed the reconfigurable circuit extension and the joint movement extension of the amoebot model with the goal of breaking this lower bound. In the joint movement extension, the way amoebots move is altered. Amoebots become able to push and pull other amoebots. Feldmann et al. demonstrated the power of joint movements by transforming a line of amoebots into a rhombus within $O(\log n)$ rounds. However, they left the details of the extension open. The goal of this paper is therefore to formalize and extend the joint movement extension. In order to provide a proof of concept for the extension, we consider two fundamental problems of modular robot systems: shape formation and locomotion. We approach these problems by defining meta-modules of rhombical and hexagonal shape, respectively. The meta-modules are capable of movement primitives like sliding, rotating, and tunneling. This allows us to simulate shape formation algorithms of various modular robot systems. Finally, we construct three amoebot structures capable of locomotion by rolling, crawling, and walking, respectively.
The Canonical Amoebot Model: Algorithms and Concurrency Control
May 06, 2021

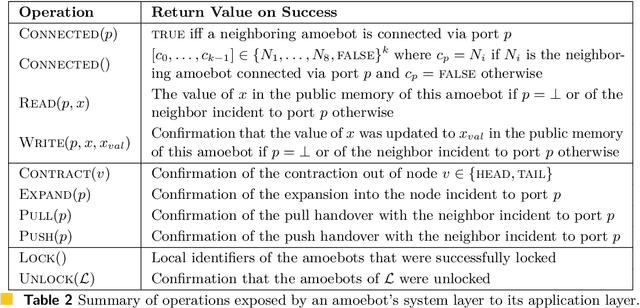
The amoebot model abstracts active programmable matter as a collection of simple computational elements called amoebots that interact locally to collectively achieve tasks of coordination and movement. Since its introduction (SPAA 2014), a growing body of literature has adapted its assumptions for a variety of problems; however, without a standardized hierarchy of assumptions, precise systematic comparison of results under the amoebot model is difficult. We propose the canonical amoebot model, an updated formalization that distinguishes between core model features and families of assumption variants. A key improvement addressed by the canonical amoebot model is concurrency. Much of the existing literature implicitly assumes amoebot actions are isolated and reliable, reducing analysis to the sequential setting where at most one amoebot is active at a time. However, real programmable matter systems are concurrent. The canonical amoebot model formalizes all amoebot communication as message passing, leveraging adversarial activation models of concurrent executions. Under this granular treatment of time, we take two complementary approaches to concurrent algorithm design. In the first, using hexagon formation as a case study, we establish a set of sufficient conditions that guarantee an algorithm's correctness under any concurrent execution, embedding concurrency control directly in algorithm design. In the second, we present a concurrency control protocol that uses locks to convert amoebot algorithms that terminate in the sequential setting and satisfy certain conventions into algorithms that exhibit equivalent behavior in the concurrent setting. These complementary approaches to concurrent algorithm design under the canonical amoebot model open new directions for distributed computing research on programmable matter and form a rigorous foundation for connections to related literature.