 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeWhat Object Should I Use? - Task Driven Object Detection
Apr 05, 2019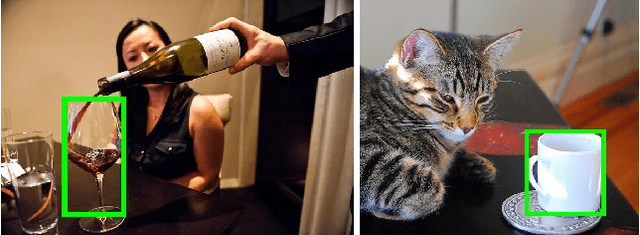


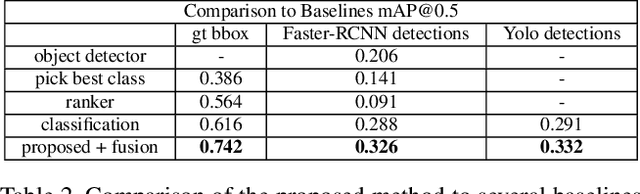
When humans have to solve everyday tasks, they simply pick the objects that are most suitable. While the question which object should one use for a specific task sounds trivial for humans, it is very difficult to answer for robots or other autonomous systems. This issue, however, is not addressed by current benchmarks for object detection that focus on detecting object categories. We therefore introduce the COCO-Tasks dataset which comprises about 40,000 images where the most suitable objects for 14 tasks have been annotated. We furthermore propose an approach that detects the most suitable objects for a given task. The approach builds on a Gated Graph Neural Network to exploit the appearance of each object as well as the global context of all present objects in the scene. In our experiments, we show that the proposed approach outperforms other approaches that are evaluated on the dataset like classification or ranking approaches.