 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFronthaul-Constrained Distributed Radar Sensing
Sep 26, 2024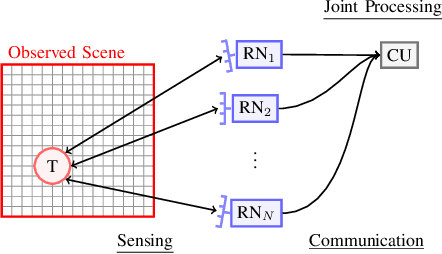
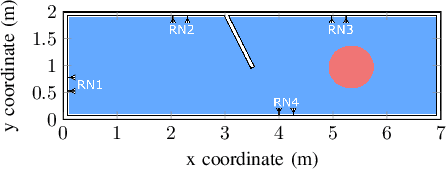
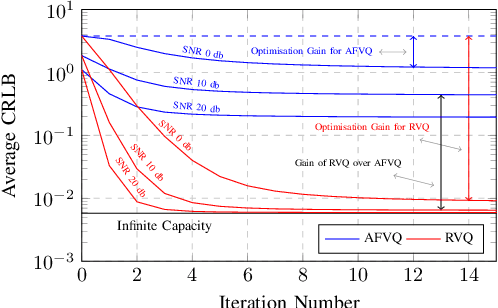
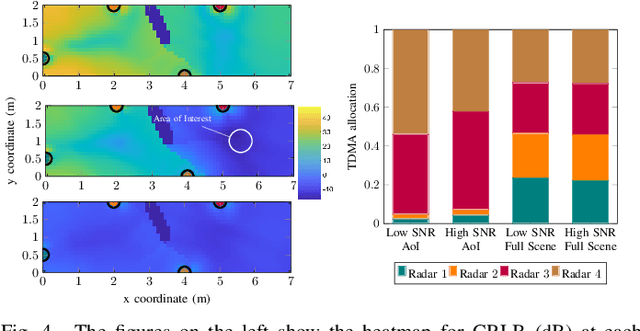
In this paper, we study a network of distributed radar sensors that collaboratively perform sensing tasks by transmitting their quantized radar signals over capacity-constrained fronthaul links to a central unit for joint processing. We consider per-antenna and per-radar vector quantization and fronthaul links with dedicated resources as well as shared resources based on time-division multiple access. For this setting, we formulate a joint optimization problem for fronthaul compression and time allocation that minimizes the Cramer Rao bound of the aggregated radar signals at the central unit. Since the problem does not admit a standard form that can be solved by existing commercial numerical solvers, we propose refomulations that enable us to develop an efficient suboptimal algorithm based on semidefinite programming and alternating convex optimization. Moreover, we analyze the convergence and complexity of the proposed algorithm. Simulation results confirm that a significant performance gain can be achieved by distributed sensing, particularly in practical scenarios where one radar may not have a sufficient view of all the scene. Furthermore, the simulation results suggest that joint fronthaul compression and time allocation are crucial for efficient exploitation of the limited fronthaul capacity.
Emergency Response Person Localization and Vital Sign Estimation Using a Semi-Autonomous Robot Mounted SFCW Radar
May 25, 2023



The large number and scale of natural and man-made disasters have led to an urgent demand for technologies that enhance the safety and efficiency of search and rescue teams. Semi-autonomous rescue robots are beneficial, especially when searching inaccessible terrains, or dangerous environments, such as collapsed infrastructures. For search and rescue missions in degraded visual conditions or non-line of sight scenarios, radar-based approaches may contribute to acquire valuable, and otherwise unavailable information. This article presents a complete signal processing chain for radar-based multi-person detection, 2D-MUSIC localization and breathing frequency estimation. The proposed method shows promising results on a challenging emergency response dataset that we collected using a semi-autonomous robot equipped with a commercially available through-wall radar system. The dataset is composed of 62 scenarios of various difficulty levels with up to five persons captured in different postures, angles and ranges including wooden and stone obstacles that block the radar line of sight. Ground truth data for reference locations, respiration, electrocardiogram, and acceleration signals are included. The full emergency response benchmark data set as well as all codes to reproduce our results, are publicly available at https://doi.org/10.21227/4bzd-jm32.