 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeIs it Raining Outside? Detection of Rainfall using General-Purpose Surveillance Cameras
Aug 12, 2019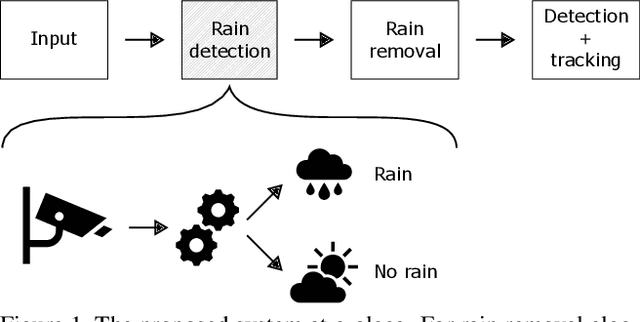

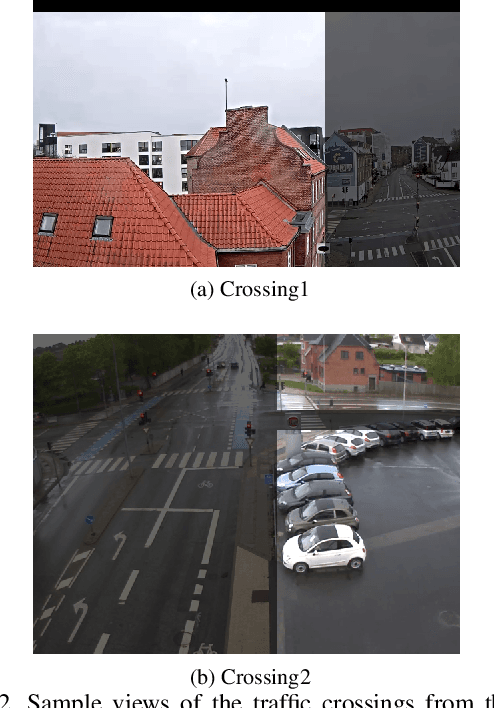
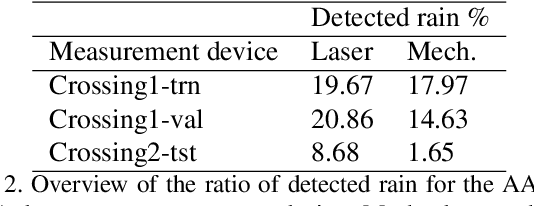
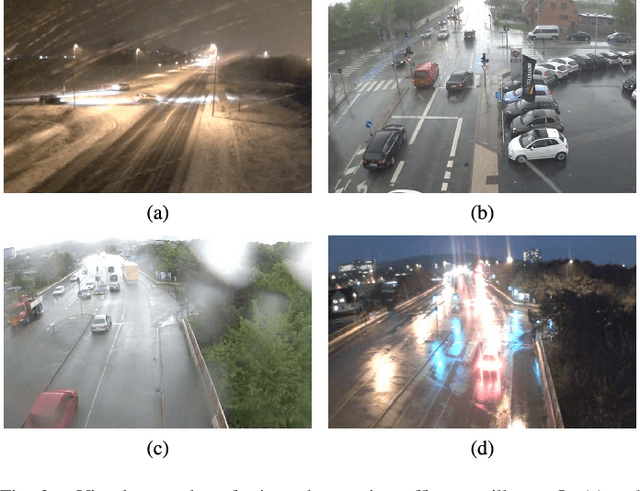
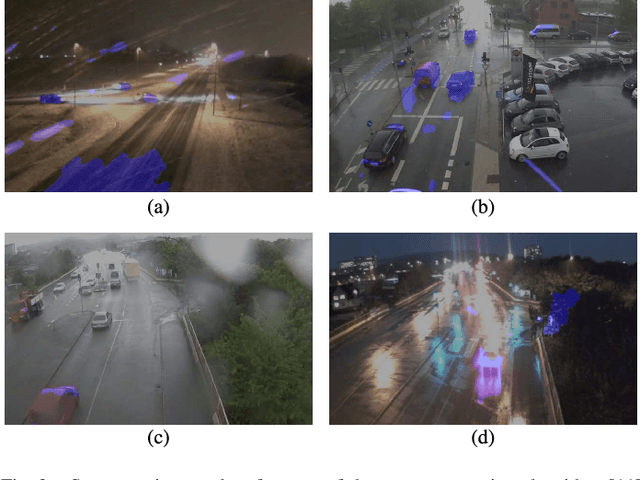
In integrated surveillance systems based on visual cameras, the mitigation of adverse weather conditions is an active research topic. Within this field, rain removal algorithms have been developed that artificially remove rain streaks from images or video. In order to deploy such rain removal algorithms in a surveillance setting, one must detect if rain is present in the scene. In this paper, we design a system for the detection of rainfall by the use of surveillance cameras. We reimplement the former state-of-the-art method for rain detection and compare it against a modern CNN-based method by utilizing 3D convolutions. The two methods are evaluated on our new AAU Visual Rain Dataset (VIRADA) that consists of 215 hours of general-purpose surveillance video from two traffic crossings. The results show that the proposed 3D CNN outperforms the previous state-of-the-art method by a large margin on all metrics, for both of the traffic crossings. Finally, it is shown that the choice of region-of-interest has a large influence on performance when trying to generalize the investigated methods. The AAU VIRADA dataset and our implementation of the two rain detection algorithms are publicly available at https://bitbucket.org/aauvap/aau-virada.
Rain Removal in Traffic Surveillance: Does it Matter?
Oct 30, 2018
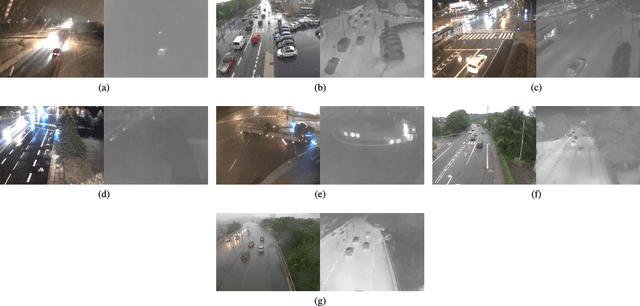
Varying weather conditions, including rainfall and snowfall, are generally regarded as a challenge for computer vision algorithms. One proposed solution to the challenges induced by rain and snowfall is to artificially remove the rain from images or video using rain removal algorithms. It is the promise of these algorithms that the rain-removed image frames will improve the performance of subsequent segmentation and tracking algorithms. However, rain removal algorithms are typically evaluated on their ability to remove synthetic rain on a small subset of images. Currently, their behavior is unknown on real-world videos when integrated with a typical computer vision pipeline. In this paper, we review the existing rain removal algorithms and propose a new dataset that consists of 22 traffic surveillance sequences under a broad variety of weather conditions that all include either rain or snowfall. We propose a new evaluation protocol that evaluates the rain removal algorithms on their ability to improve the performance of subsequent segmentation, instance segmentation, and feature tracking algorithms under rain and snow. If successful, the de-rained frames of a rain removal algorithm should improve segmentation performance and increase the number of accurately tracked features. The results show that a recent single-frame-based rain removal algorithm increases the segmentation performance by 19.7% on our proposed dataset, but it eventually decreases the feature tracking performance and showed mixed results with recent instance segmentation methods. However, the best video-based rain removal algorithm improves the feature tracking accuracy by 7.72%.
The AAU Multimodal Annotation Toolboxes: Annotating Objects in Images and Videos
Sep 10, 2018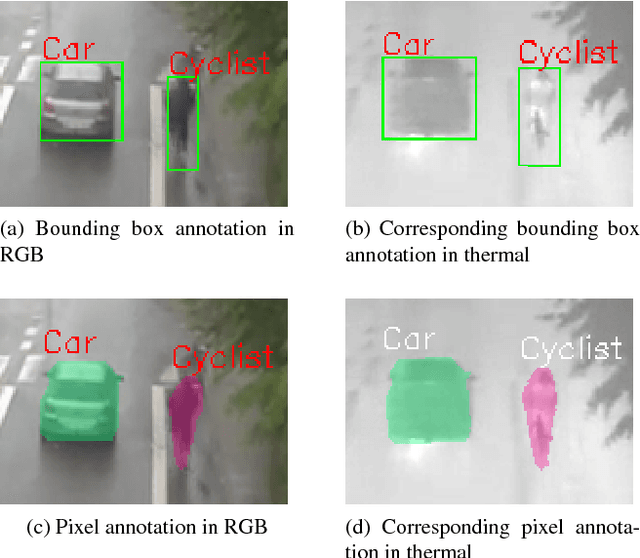
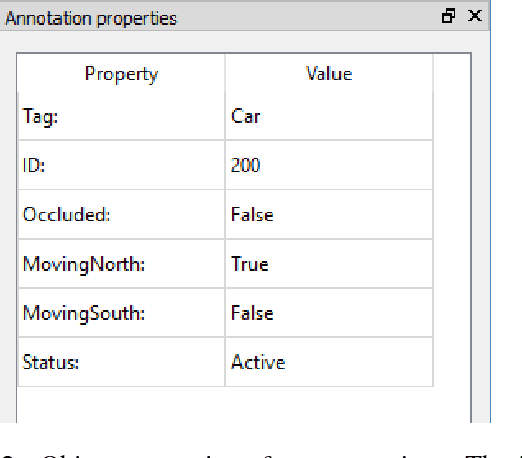
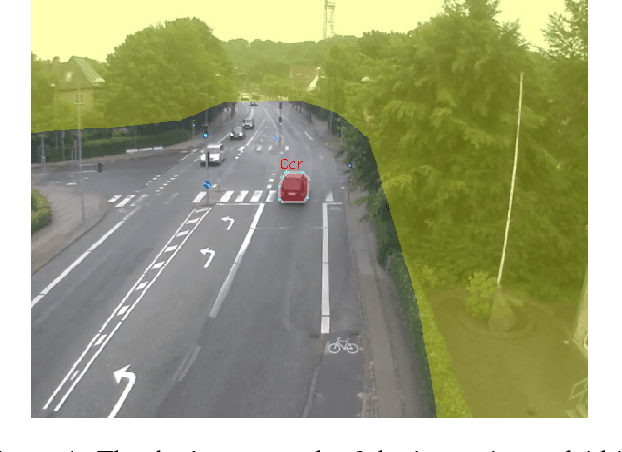
This tech report gives an introduction to two annotation toolboxes that enable the creation of pixel and polygon-based masks as well as bounding boxes around objects of interest. Both toolboxes support the annotation of sequential images in the RGB and thermal modalities. Each annotated object is assigned a classification tag, a unique ID, and one or more optional meta data tags. The toolboxes are written in C++ with the OpenCV and Qt libraries and are operated by using the visual interface and the extensive range of keyboard shortcuts. Pre-built binaries are available for Windows and MacOS and the tools can be built from source under Linux as well. So far, tens of thousands of frames have been annotated using the toolboxes.