 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDetermining Accessible Sidewalk Width by Extracting Obstacle Information from Point Clouds
Nov 08, 2022Obstacles on the sidewalk often block the path, limiting passage and resulting in frustration and wasted time, especially for citizens and visitors who use assistive devices (wheelchairs, walkers, strollers, canes, etc). To enable equal participation and use of the city, all citizens should be able to perform and complete their daily activities in a similar amount of time and effort. Therefore, we aim to offer accessibility information regarding sidewalks, so that citizens can better plan their routes, and to help city officials identify the location of bottlenecks and act on them. In this paper we propose a novel pipeline to estimate obstacle-free sidewalk widths based on 3D point cloud data of the city of Amsterdam, as the first step to offer a more complete set of information regarding sidewalk accessibility.
Automatic labelling of urban point clouds using data fusion
Aug 31, 2021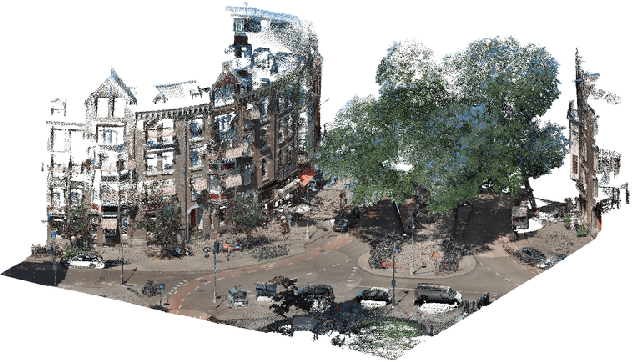

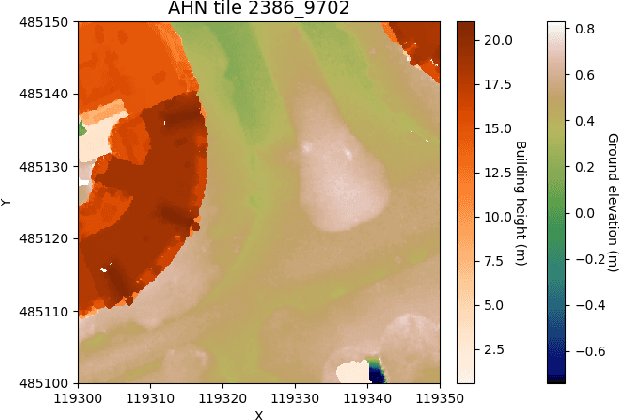
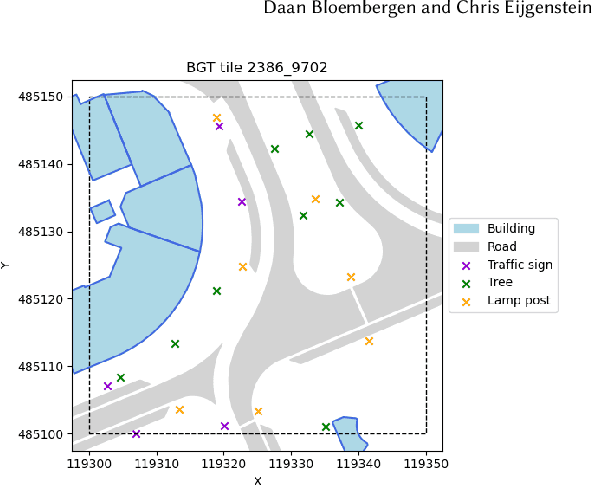
In this paper we describe an approach to semi-automatically create a labelled dataset for semantic segmentation of urban street-level point clouds. We use data fusion techniques using public data sources such as elevation data and large-scale topographical maps to automatically label parts of the point cloud, after which only limited human effort is needed to check the results and make amendments where needed. This drastically limits the time needed to create a labelled dataset that is extensive enough to train deep semantic segmentation models. We apply our method to point clouds of the Amsterdam region, and successfully train a RandLA-Net semantic segmentation model on the labelled dataset. These results demonstrate the potential of smart data fusion and semantic segmentation for the future of smart city planning and management.