 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCenter3D: Center-based Monocular 3D Object Detection with Joint Depth Understanding
May 27, 2020
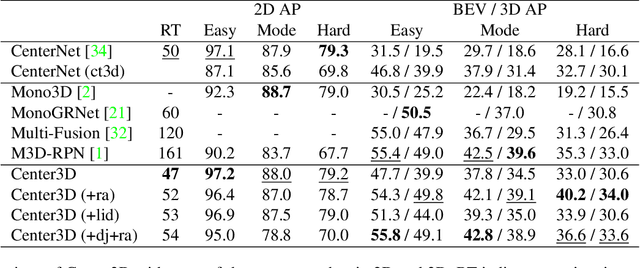

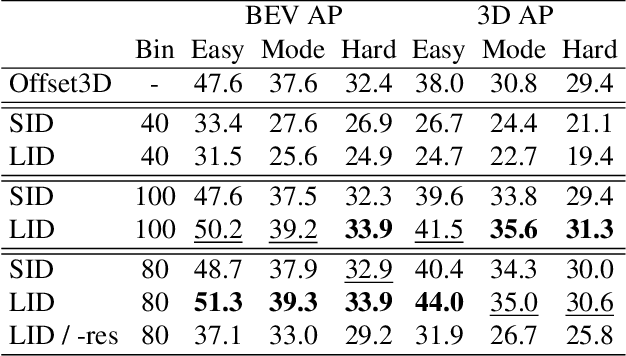
Localizing objects in 3D space and understanding their associated 3D properties is challenging given only monocular RGB images. The situation is compounded by the loss of depth information during perspective projection. We present Center3D, a one-stage anchor-free approach, to efficiently estimate 3D location and depth using only monocular RGB images. By exploiting the difference between 2D and 3D centers, we are able to estimate depth consistently. Center3D uses a combination of classification and regression to understand the hidden depth information more robustly than each method alone. Our method employs two joint approaches: (1) LID: a classification-dominated approach with sequential Linear Increasing Discretization. (2) DepJoint: a regression-dominated approach with multiple Eigen's transformations for depth estimation. Evaluating on KITTI dataset for moderate objects, Center3D improved the AP in BEV from $29.7\%$ to $42.8\%$, and the AP in 3D from $18.6\%$ to $39.1\%$. Compared with state-of-the-art detectors, Center3D has achieved the best speed-accuracy trade-off in realtime monocular object detection.
A2D2: Audi Autonomous Driving Dataset
Apr 14, 2020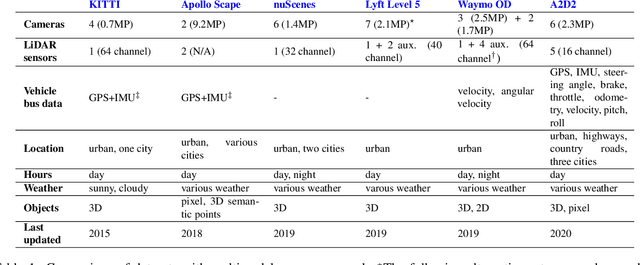
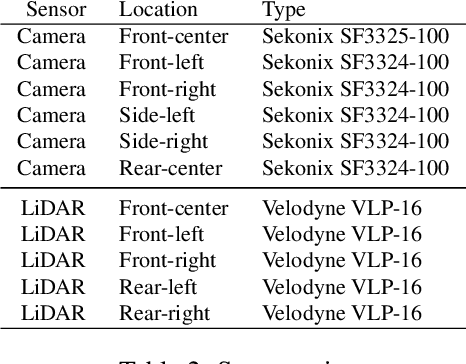
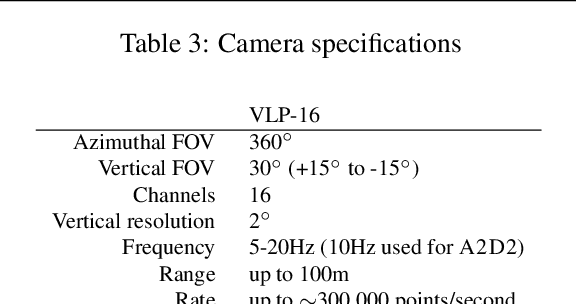
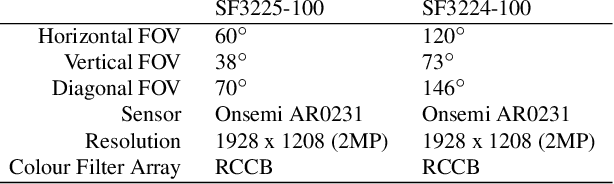
Research in machine learning, mobile robotics, and autonomous driving is accelerated by the availability of high quality annotated data. To this end, we release the Audi Autonomous Driving Dataset (A2D2). Our dataset consists of simultaneously recorded images and 3D point clouds, together with 3D bounding boxes, semantic segmentation, instance segmentation, and data extracted from the automotive bus. Our sensor suite consists of six cameras and five LiDAR units, providing full 360 degree coverage. The recorded data is time synchronized and mutually registered. Annotations are for non-sequential frames: 41,277 frames with semantic segmentation image and point cloud labels, of which 12,497 frames also have 3D bounding box annotations for objects within the field of view of the front camera. In addition, we provide 392,556 sequential frames of unannotated sensor data for recordings in three cities in the south of Germany. These sequences contain several loops. Faces and vehicle number plates are blurred due to GDPR legislation and to preserve anonymity. A2D2 is made available under the CC BY-ND 4.0 license, permitting commercial use subject to the terms of the license. Data and further information are available at http://www.a2d2.audi.