 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeUrban Region Embeddings from Service-Specific Mobile Traffic Data
Nov 20, 2024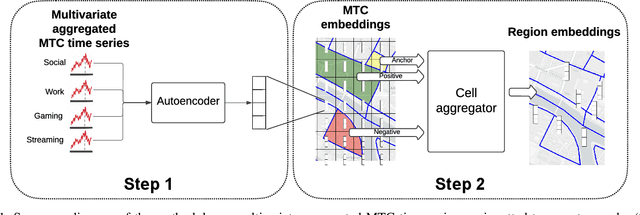
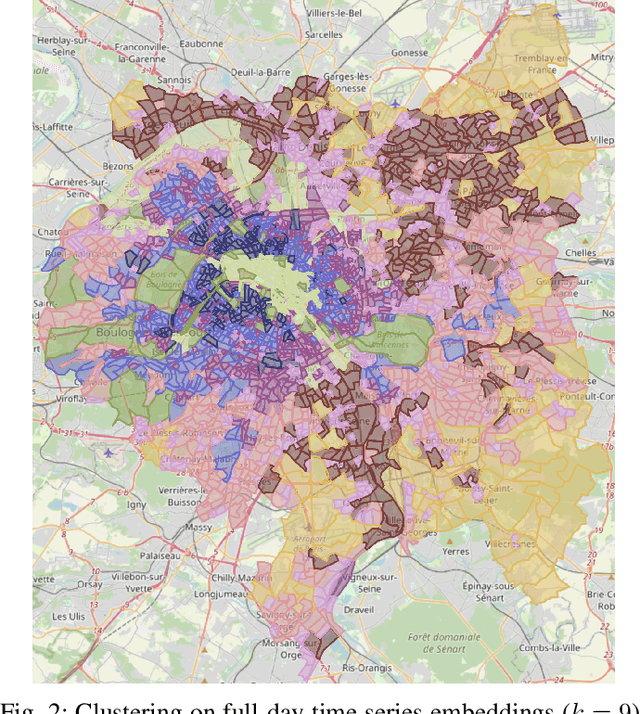
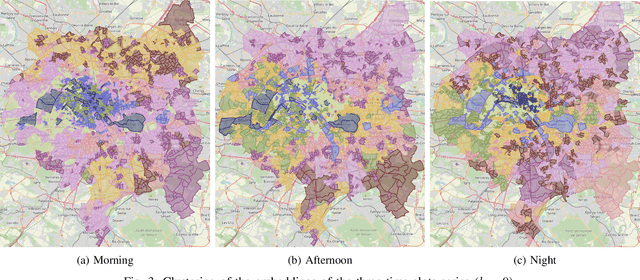
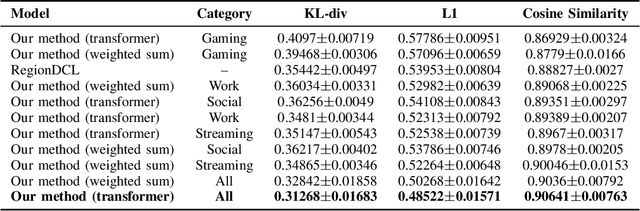
With the advent of advanced 4G/5G mobile networks, mobile phone data collected by operators now includes detailed, service-specific traffic information with high spatio-temporal resolution. In this paper, we leverage this type of data to explore its potential for generating high-quality representations of urban regions. To achieve this, we present a methodology for creating urban region embeddings from service-specific mobile traffic data, employing a temporal convolutional network-based autoencoder, transformers, and learnable weighted sum models to capture key urban features. In the extensive experimental evaluation conducted using a real-world dataset, we demonstrate that the embeddings generated by our methodology effectively capture urban characteristics. Specifically, our embeddings are compared against those of a state-of-the-art competitor across two downstream tasks. Additionally, through clustering techniques, we investigate how well the embeddings produced by our methodology capture the temporal dynamics and characteristics of the underlying urban regions. Overall, this work highlights the potential of service-specific mobile traffic data for urban research and emphasizes the importance of making such data accessible to support public innovation.
Predicting vehicles parking behaviour in shared premises for aggregated EV electricity demand response programs
Sep 20, 2021

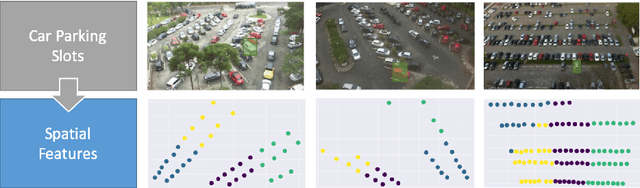
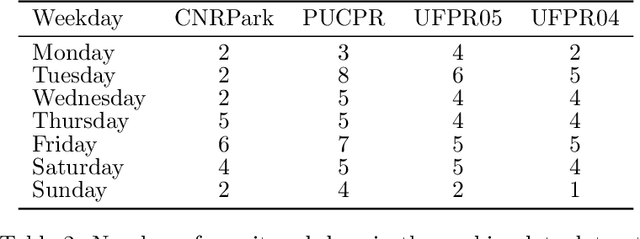
The global electric car sales in 2020 continued to exceed the expectations climbing to over 3 millions and reaching a market share of over 4%. However, uncertainty of generation caused by higher penetration of renewable energies and the advent of Electrical Vehicles (EV) with their additional electricity demand could cause strains to the power system, both at distribution and transmission levels. Demand response aggregation and load control will enable greater grid stability and greater penetration of renewable energies into the grid. The present work fits this context in supporting charging optimization for EV in parking premises assuming a incumbent high penetration of EVs in the system. We propose a methodology to predict an estimation of the parking duration in shared parking premises with the objective of estimating the energy requirement of a specific parking lot, evaluate optimal EVs charging schedule and integrate the scheduling into a smart controller. We formalize the prediction problem as a supervised machine learning task to predict the duration of the parking event before the car leaves the slot. This predicted duration feeds the energy management system that will allocate the power over the duration reducing the overall peak electricity demand. We structure our experiments inspired by two research questions aiming to discover the accuracy of the proposed machine learning approach and the most relevant features for the prediction models. We experiment different algorithms and features combination for 4 datasets from 2 different campus facilities in Italy and Brazil. Using both contextual and time of the day features, the overall results of the models shows an higher accuracy compared to a statistical analysis based on frequency, indicating a viable route for the development of accurate predictors for sharing parking premises energy management systems
PTRAIL -- A python package for parallel trajectory data preprocessing
Aug 26, 2021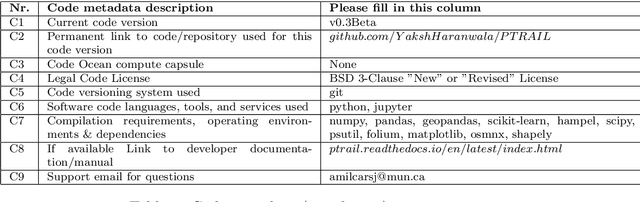
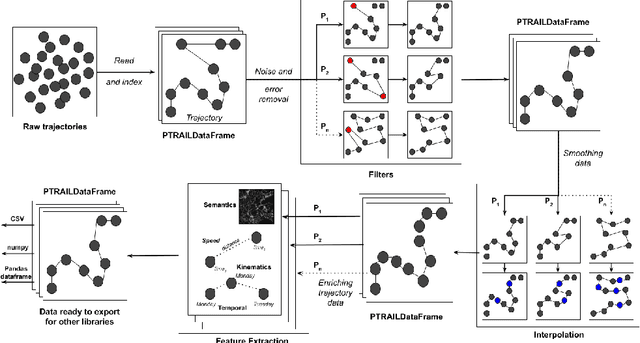

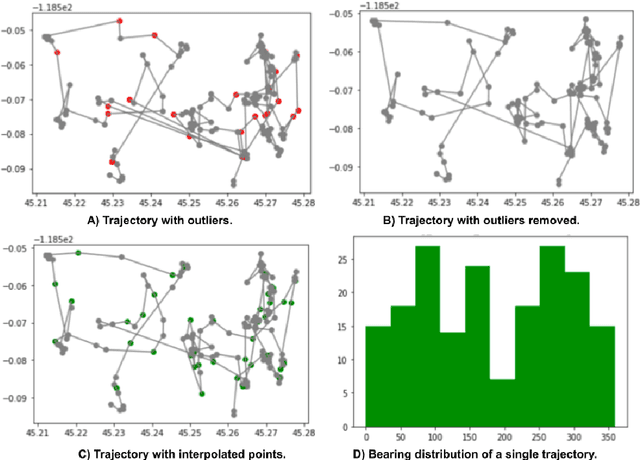
Trajectory data represent a trace of an object that changes its position in space over time. This kind of data is complex to handle and analyze, since it is generally produced in huge quantities, often prone to errors generated by the geolocation device, human mishandling, or area coverage limitation. Therefore, there is a need for software specifically tailored to preprocess trajectory data. In this work we propose PTRAIL, a python package offering several trajectory preprocessing steps, including filtering, feature extraction, and interpolation. PTRAIL uses parallel computation and vectorization, being suitable for large datasets and fast compared to other python libraries.