 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGeometry Depth Consistency in RGBD Relative Pose Estimation
Jan 01, 2024Relative pose estimation for RGBD cameras is crucial in a number of applications. Previous approaches either rely on the RGB aspect of the images to estimate pose thus not fully making use of depth in the estimation process or estimate pose from the 3D cloud of points that each image produces, thus not making full use of RGB information. This paper shows that if one pair of correspondences is hypothesized from the RGB-based ranked-ordered correspondence list, then the space of remaining correspondences is restricted to corresponding pairs of curves nested around the hypothesized correspondence, implicitly capturing depth consistency. This simple Geometric Depth Constraint (GDC) significantly reduces potential matches. In effect this becomes a filter on possible correspondences that helps reduce the number of outliers and thus expedites RANSAC significantly. As such, the same budget of time allows for more RANSAC iterations and therefore additional robustness and a significant speedup. In addition, the paper proposed a Nested RANSAC approach that also speeds up the process, as shown through experiments on TUM, ICL-NUIM, and RGBD Scenes v2 datasets.
GPU-Based Homotopy Continuation for Minimal Problems in Computer Vision
Dec 13, 2021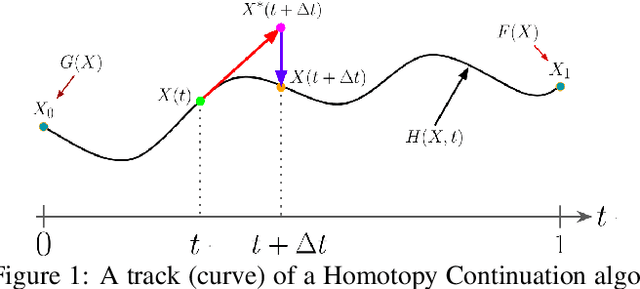
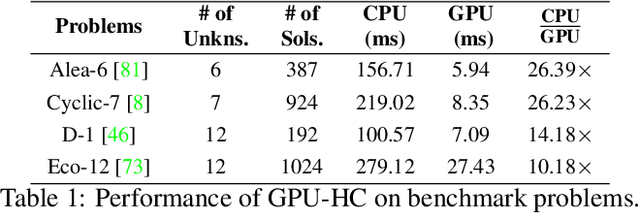
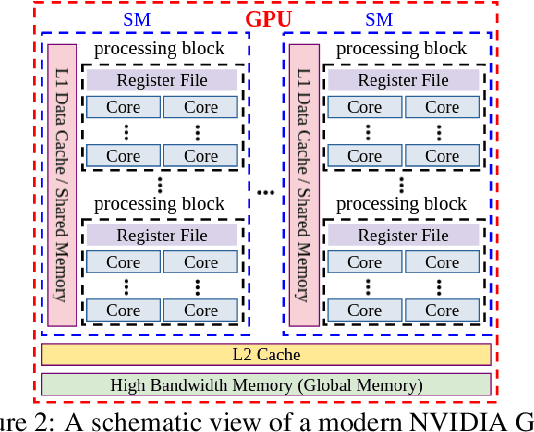
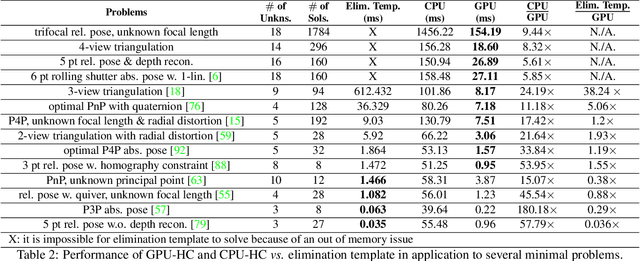
Systems of polynomial equations arise frequently in computer vision, especially in multiview geometry problems. Traditional methods for solving these systems typically aim to eliminate variables to reach a univariate polynomial, e.g., a tenth-order polynomial for 5-point pose estimation, using clever manipulations, or more generally using Grobner basis, resultants, and elimination templates, leading to successful algorithms for multiview geometry and other problems. However, these methods do not work when the problem is complex and when they do, they face efficiency and stability issues. Homotopy Continuation (HC) can solve more complex problems without the stability issues, and with guarantees of a global solution, but they are known to be slow. In this paper we show that HC can be parallelized on a GPU, showing significant speedups up to 26 times on polynomial benchmarks. We also show that GPU-HC can be generically applied to a range of computer vision problems, including 4-view triangulation and trifocal pose estimation with unknown focal length, which cannot be solved with elimination template but they can be efficiently solved with HC. GPU-HC opens the door to easy formulation and solution of a range of computer vision problems.