 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeKimi K2.5: Visual Agentic Intelligence
Feb 02, 2026We introduce Kimi K2.5, an open-source multimodal agentic model designed to advance general agentic intelligence. K2.5 emphasizes the joint optimization of text and vision so that two modalities enhance each other. This includes a series of techniques such as joint text-vision pre-training, zero-vision SFT, and joint text-vision reinforcement learning. Building on this multimodal foundation, K2.5 introduces Agent Swarm, a self-directed parallel agent orchestration framework that dynamically decomposes complex tasks into heterogeneous sub-problems and executes them concurrently. Extensive evaluations show that Kimi K2.5 achieves state-of-the-art results across various domains including coding, vision, reasoning, and agentic tasks. Agent Swarm also reduces latency by up to $4.5\times$ over single-agent baselines. We release the post-trained Kimi K2.5 model checkpoint to facilitate future research and real-world applications of agentic intelligence.
Learning "Look-Ahead" Nonlocal Traffic Dynamics in a Ring Road
Dec 05, 2023



The macroscopic traffic flow model is widely used for traffic control and management. To incorporate drivers' anticipative behaviors and to remove impractical speed discontinuity inherent in the classic Lighthill-Whitham-Richards (LWR) traffic model, nonlocal partial differential equation (PDE) models with ``look-ahead" dynamics have been proposed, which assume that the speed is a function of weighted downstream traffic density. However, it lacks data validation on two important questions: whether there exist nonlocal dynamics, and how the length and weight of the ``look-ahead" window affect the spatial temporal propagation of traffic densities. In this paper, we adopt traffic trajectory data from a ring-road experiment and design a physics-informed neural network to learn the fundamental diagram and look-ahead kernel that best fit the data, and reinvent a data-enhanced nonlocal LWR model via minimizing the loss function combining the data discrepancy and the nonlocal model discrepancy. Results show that the learned nonlocal LWR yields a more accurate prediction of traffic wave propagation in three different scenarios: stop-and-go oscillations, congested, and free traffic. We first demonstrate the existence of ``look-ahead" effect with real traffic data. The optimal nonlocal kernel is found out to take a length of around 35 to 50 meters, and the kernel weight within 5 meters accounts for the majority of the nonlocal effect. Our results also underscore the importance of choosing a priori physics in machine learning models.
A Spatial-Temporal Attention Multi-Graph Convolution Network for Ride-Hailing Demand Prediction Based on Periodicity with Offset
Apr 08, 2022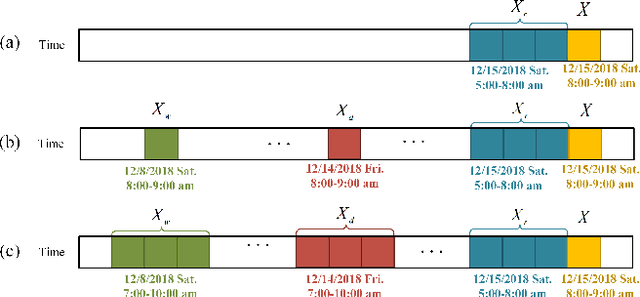
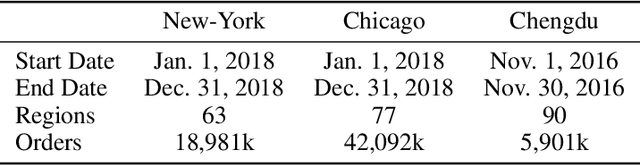

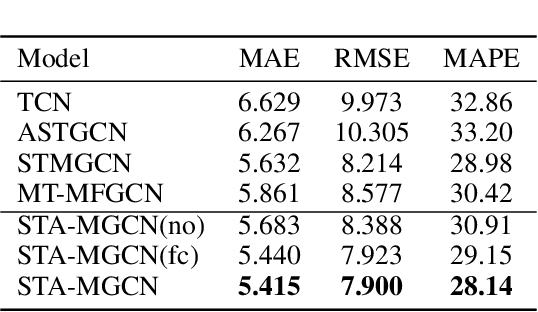
Ride-hailing service is becoming a leading part in urban transportation. To improve the efficiency of ride-hailing service, accurate prediction of transportation demand is a fundamental challenge. In this paper, we tackle this problem from both aspects of network structure and data-set formulation. For network design, we propose a spatial-temporal attention multi-graph convolution network (STA-MGCN). A spatial-temporal layer in STA-MGCN is developed to capture the temporal correlations by temporal attention mechanism and temporal gate convolution, and the spatial correlations by multigraph convolution. A feature cluster layer is introduced to learn latent regional functions and to reduce the computation burden. For the data-set formulation, we develop a novel approach which considers the transportation feature of periodicity with offset. Instead of only using history data during the same time period, the history order demand in forward and backward neighboring time periods from yesterday and last week are also included. Extensive experiments on the three real-world datasets of New-York, Chicago and Chengdu show that the proposed algorithm achieves the state-of-the-art performance for ride-hailing demand prediction.
A Traffic Light Dynamic Control Algorithm with Deep Reinforcement Learning Based on GNN Prediction
Sep 29, 2020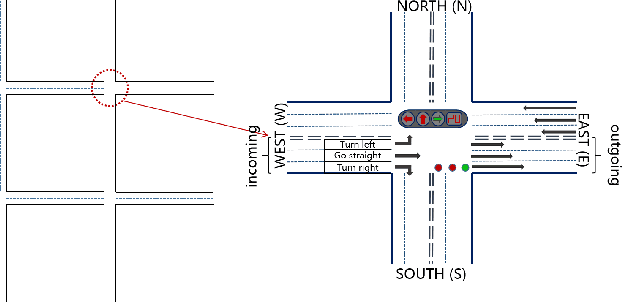
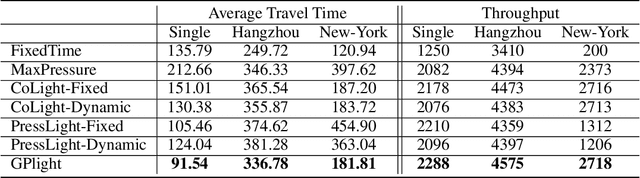
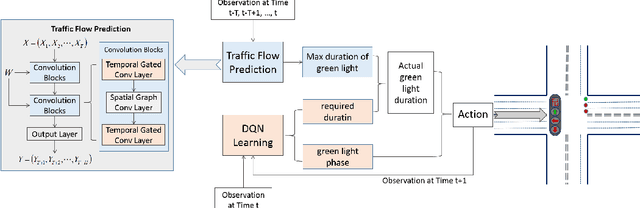
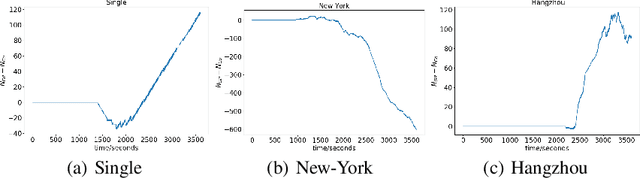
Today's intelligent traffic light control system is based on the current road traffic conditions for traffic regulation. However, these approaches cannot exploit the future traffic information in advance. In this paper, we propose GPlight, a deep reinforcement learning (DRL) algorithm integrated with graph neural network (GNN) , to relieve the traffic congestion for multi-intersection intelligent traffic control system. In GPlight, the graph neural network (GNN) is first used to predict the future short-term traffic flow at the intersections. Then, the results of traffic flow prediction are used in traffic light control, and the agent combines the predicted results with the observed current traffic conditions to dynamically control the phase and duration of the traffic lights at the intersection. Experiments on both synthetic and two real-world data-sets of Hangzhou and New-York verify the effectiveness and rationality of the GPlight algorithm.
PDLight: A Deep Reinforcement Learning Traffic Light Control Algorithm with Pressure and Dynamic Light Duration
Sep 29, 2020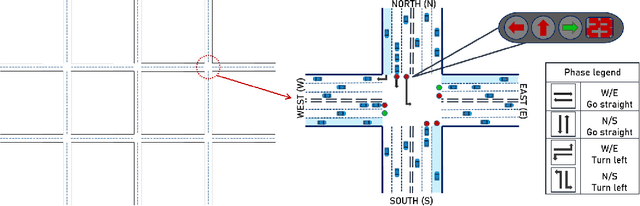


Existing ineffective and inflexible traffic light control at urban intersections can often lead to congestion in traffic flows and cause numerous problems, such as long delay and waste of energy. How to find the optimal signal timing strategy is a significant challenge in urban traffic management. In this paper, we propose PDlight, a deep reinforcement learning (DRL) traffic light control algorithm with a novel reward as PRCOL (Pressure with Remaining Capacity of Outgoing Lane). Serving as an improvement over the pressure used in traffic control algorithms, PRCOL considers not only the number of vehicles on the incoming lane but also the remaining capacity of the outgoing lane. Simulation results using both synthetic and real-world data-sets show that the proposed PDlight yields lower average travel time compared with several state-of-the-art algorithms, PressLight and Colight, under both fixed and dynamic green light duration.