 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAutomatic mobility analysis of parallel mechanisms: an algorithm approach based on position and orientation characteristic equations
Jul 19, 2019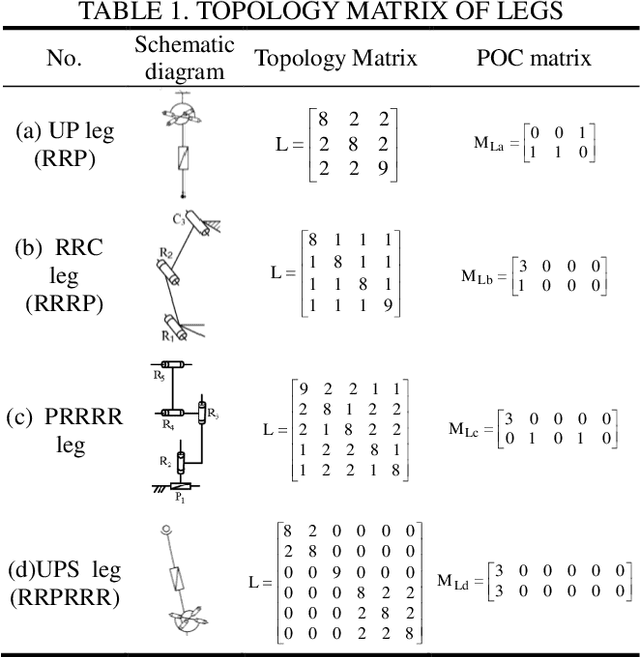
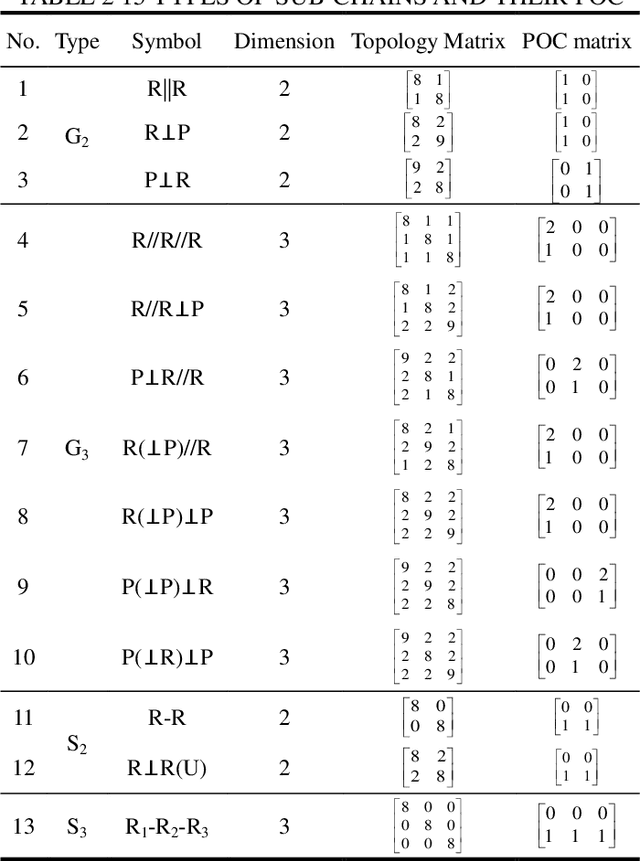
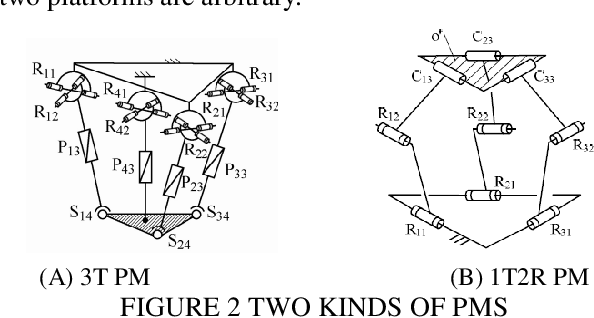
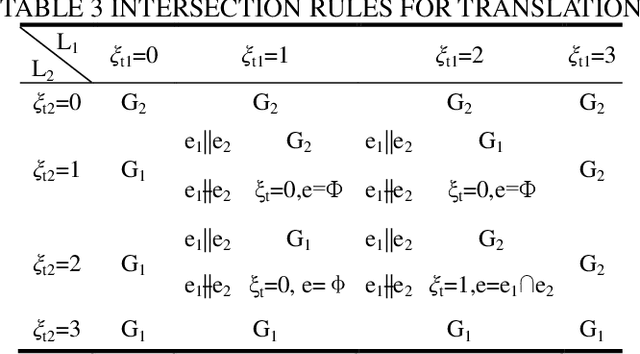
The determination of the mobility of parallel mechanisms (PM) is a fundamental problem. An automatic and intelligent analysis platform will be a significant tool for the design and optimization of mechanical systems. Based on the theory of position and orientation characteristics (POC) equations, a systematic approach to computer-aided mobility analysis of PMs is presented in this paper. First, a digital model for topological structures which has a mapping relationship with position and orientation characteristics of mechanism is proposed. It describes not only the dimension of the motion output, but also gives the mapping relationship between the output characteristic and the axis of the kinematic joints. Secondly, algorithmic rules are established that convert the union and intersection operations of POC into the binary logical operations and the automatic analysis of POC are realized. Then, the algorithm of the automatic mobility analysis of PMs and its implementation with VC++ are written .The mobility and its properties (POC) will also be analyzed and displayed automatically after introducing by users of the data of topological structures representation. Finally, typical examples are provided to show the effectiveness of the software platform.
Topological design of an asymmetric 3-translational parallel mechanism with zero coupling degree and motion decoupling
May 23, 2018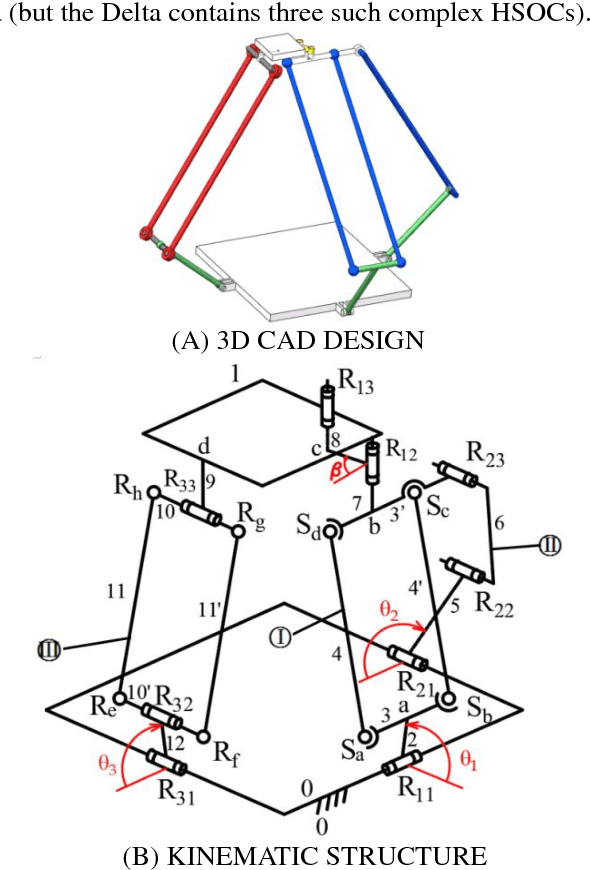
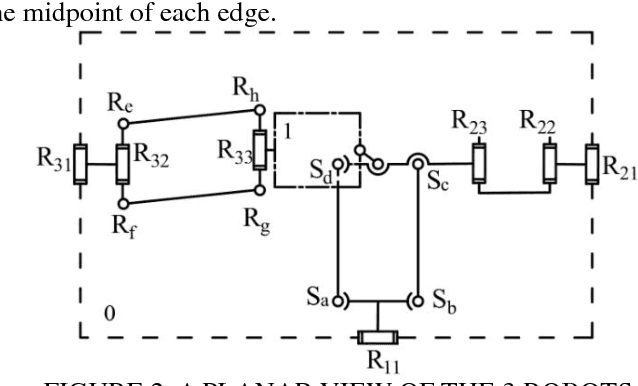
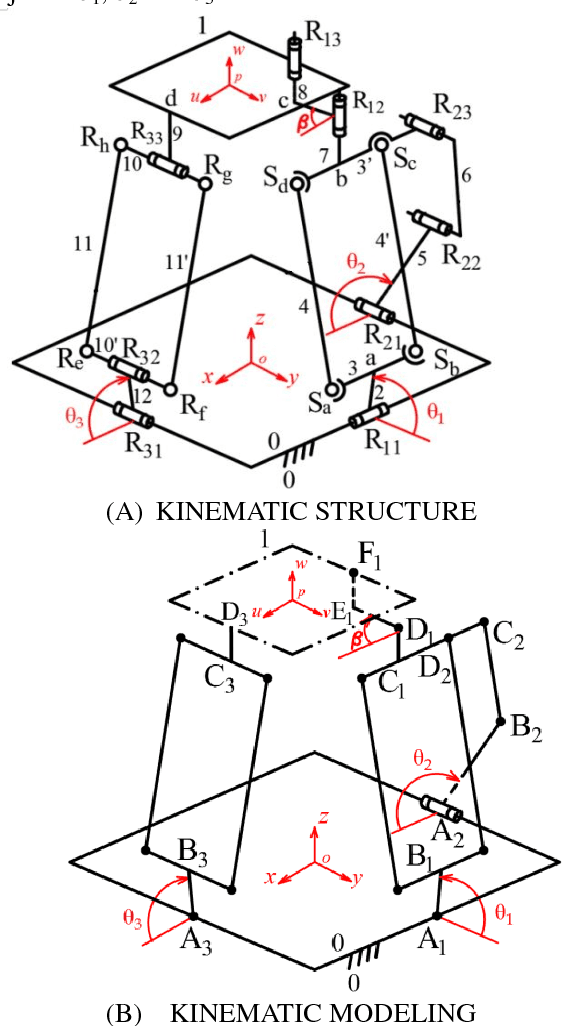
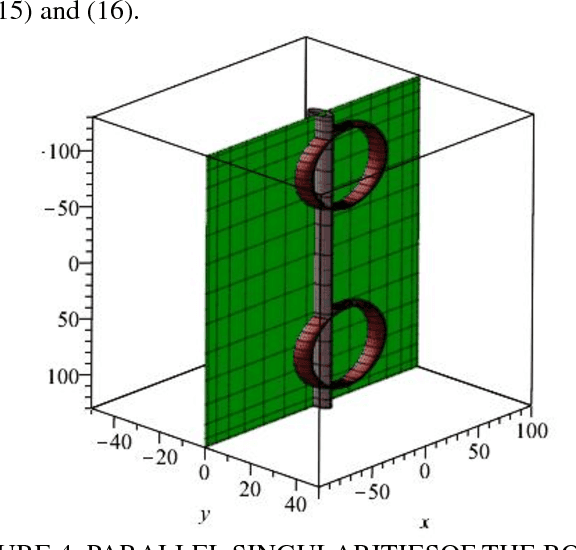
In this paper a new asymmetric 3-translational (3T) parallel manipulator, i.e., RPa(3R) 2R+RPa, with zero coupling degree and decoupled motion is firstly proposed according to topology design theory of parallel mechanism (PM) based on position and orientation characteristics (POC) equations. The main topological characteristics such as POC, degree of freedom and coupling degree are calculated. Then, the analytical formula for the direct and inverse kinematic are directly derived since coupling degree of the PM is zero. The study of singular configurations is simple because of the independence of the kinematic chains.