 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDynamic PET Image Reconstruction via Non-negative INR Factorization
Mar 11, 2025The reconstruction of dynamic positron emission tomography (PET) images from noisy projection data is a significant but challenging problem. In this paper, we introduce an unsupervised learning approach, Non-negative Implicit Neural Representation Factorization (\texttt{NINRF}), based on low rank matrix factorization of unknown images and employing neural networks to represent both coefficients and bases. Mathematically, we demonstrate that if a sequence of dynamic PET images satisfies a generalized non-negative low-rank property, it can be decomposed into a set of non-negative continuous functions varying in the temporal-spatial domain. This bridges the well-established non-negative matrix factorization (NMF) with continuous functions and we propose using implicit neural representations (INRs) to connect matrix with continuous functions. The neural network parameters are obtained by minimizing the KL divergence, with additional sparsity regularization on coefficients and bases. Extensive experiments on dynamic PET reconstruction with Poisson noise demonstrate the effectiveness of the proposed method compared to other methods, while giving continuous representations for object's detailed geometric features and regional concentration variation.
Few-shot Multi-Task Learning of Linear Invariant Features with Meta Subspace Pursuit
Sep 04, 2024
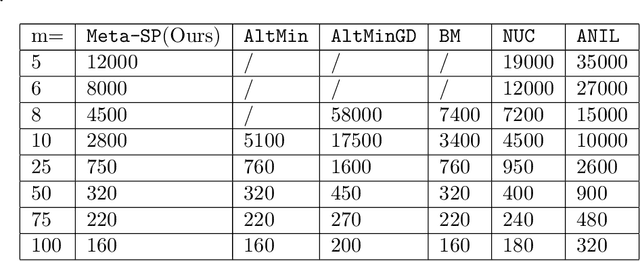

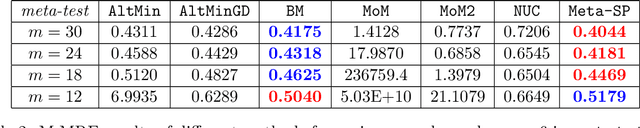
Data scarcity poses a serious threat to modern machine learning and artificial intelligence, as their practical success typically relies on the availability of big datasets. One effective strategy to mitigate the issue of insufficient data is to first harness information from other data sources possessing certain similarities in the study design stage, and then employ the multi-task or meta learning framework in the analysis stage. In this paper, we focus on multi-task (or multi-source) linear models whose coefficients across tasks share an invariant low-rank component, a popular structural assumption considered in the recent multi-task or meta learning literature. Under this assumption, we propose a new algorithm, called Meta Subspace Pursuit (abbreviated as Meta-SP), that provably learns this invariant subspace shared by different tasks. Under this stylized setup for multi-task or meta learning, we establish both the algorithmic and statistical guarantees of the proposed method. Extensive numerical experiments are conducted, comparing Meta-SP against several competing methods, including popular, off-the-shelf model-agnostic meta learning algorithms such as ANIL. These experiments demonstrate that Meta-SP achieves superior performance over the competing methods in various aspects.