 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCASHEW: Stabilizing Multimodal Reasoning via Iterative Trajectory Aggregation
Jan 12, 2026Vision-language models achieve strong performance across a wide range of multimodal understanding and reasoning tasks, yet their multi-step reasoning remains unstable. Repeated sampling over the same input often produces divergent reasoning trajectories and inconsistent final predictions. To address this, we introduce two complementary approaches inspired by test-time scaling: (1) CASHEW, an inference-time framework that stabilizes reasoning by iteratively aggregating multiple candidate trajectories into higher-quality reasoning traces, with explicit visual verification filtering hallucinated steps and grounding reasoning in visual evidence, and (2) CASHEW-RL, a learned variant that internalizes this aggregation behavior within a single model. CASHEW-RL is trained using Group Sequence Policy Optimization (GSPO) with a composite reward that encourages correct answers grounded in minimal yet sufficient visual evidence, while adaptively allocating reasoning effort based on task difficulty. This training objective enables robust self-aggregation at inference. Extensive experiments on 13 image understanding, video understanding, and video reasoning benchmarks show significant performance improvements, including gains of up to +23.6 percentage points on ScienceQA and +8.1 percentage points on EgoSchema.
VideoA11y: Method and Dataset for Accessible Video Description
Feb 27, 2025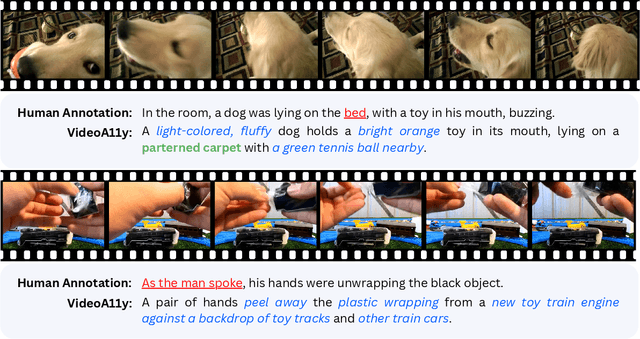



Video descriptions are crucial for blind and low vision (BLV) users to access visual content. However, current artificial intelligence models for generating descriptions often fall short due to limitations in the quality of human annotations within training datasets, resulting in descriptions that do not fully meet BLV users' needs. To address this gap, we introduce VideoA11y, an approach that leverages multimodal large language models (MLLMs) and video accessibility guidelines to generate descriptions tailored for BLV individuals. Using this method, we have curated VideoA11y-40K, the largest and most comprehensive dataset of 40,000 videos described for BLV users. Rigorous experiments across 15 video categories, involving 347 sighted participants, 40 BLV participants, and seven professional describers, showed that VideoA11y descriptions outperform novice human annotations and are comparable to trained human annotations in clarity, accuracy, objectivity, descriptiveness, and user satisfaction. We evaluated models on VideoA11y-40K using both standard and custom metrics, demonstrating that MLLMs fine-tuned on this dataset produce high-quality accessible descriptions. Code and dataset are available at https://people-robots.github.io/VideoA11y.
VidHalluc: Evaluating Temporal Hallucinations in Multimodal Large Language Models for Video Understanding
Dec 04, 2024Multimodal large language models (MLLMs) have recently shown significant advancements in video understanding, excelling in content reasoning and instruction-following tasks. However, the problem of hallucination, where models generate inaccurate or misleading content, remains underexplored in the video domain. Building on the observation that the visual encoder of MLLMs often struggles to differentiate between video pairs that are visually distinct but semantically similar, we introduce VidHalluc, the largest benchmark designed to examine hallucinations in MLLMs for video understanding tasks. VidHalluc assesses hallucinations across three critical dimensions: (1) action, (2) temporal sequence, and (3) scene transition. VidHalluc consists of 5,002 videos, paired based on semantic similarity and visual differences, focusing on cases where hallucinations are most likely to occur. Through comprehensive testing, our experiments show that most MLLMs are vulnerable to hallucinations across these dimensions. Furthermore, we propose DINO-HEAL, a training-free method that reduces hallucinations by incorporating spatial saliency information from DINOv2 to reweight visual features during inference. Our results demonstrate that DINO-HEAL consistently improves performance on VidHalluc, achieving an average improvement of 3.02% in mitigating hallucinations among all tasks. Both the VidHalluc benchmark and DINO-HEAL code can be accessed via $\href{https://vid-halluc.github.io/}{\text{this link}}$.