 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFGAGT: Flow-Guided Adaptive Graph Tracking
Nov 04, 2020
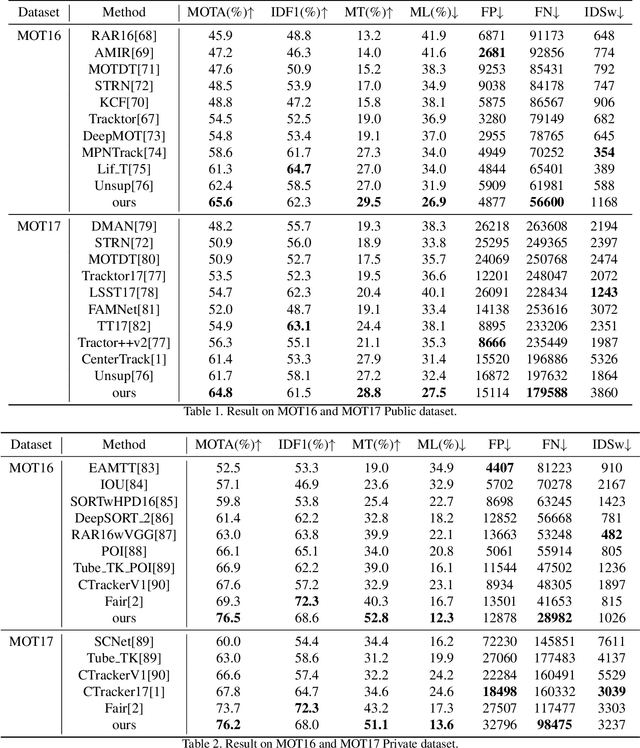
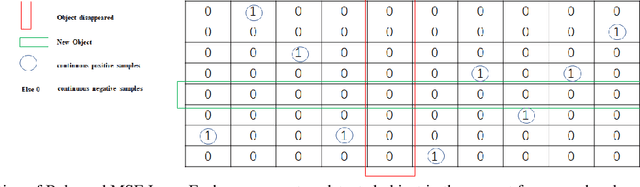
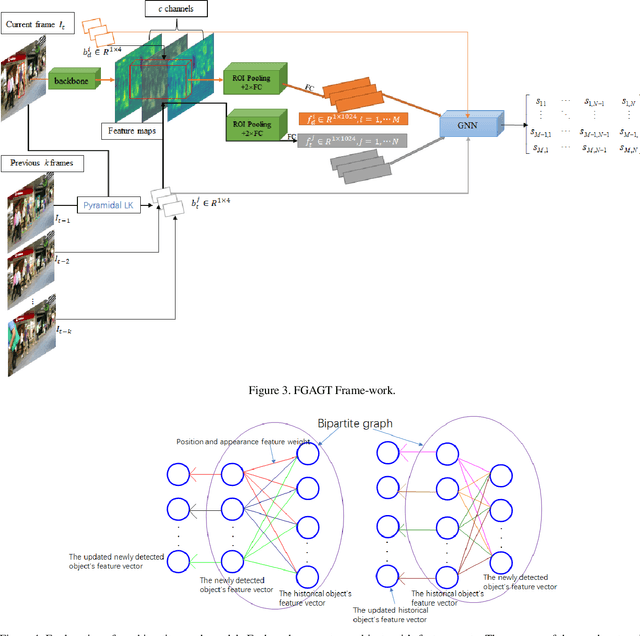
Most previous tracking methods usually use the optical flow method to estimate the position of the historical object in the current frame and then use the linear combination of feature similarity and IOU(Intersection over Union) to perform association matching near the position. However, the features used in these methods are not aligned, i.e., the features of the historical objects are extracted from the historical feature maps, not from the current frame, even the same object may undergo posture, angle, etc. changes during the movement, and even light intensity changes. In addition, most methods only use the appearance information when extracting the feature vector, not the position relationship, nor the feature information of the historical object, so the information is not fully utilized. In order to solve the above problems, we proposed the FGAGT tracker, which uses the optical flow method to predict the center position of the historical object in the current frame and extract the feature vector, so that the feature of the historical object can be aligned with the feature of the object in the current frame. Then these features are input into the graph neural network, and the global Spatio-temporal position and appearance information are integrated to update the feature vectors of all objects. In the training phase, we propose the Balanced MSE LOSS to balance the sample distribution for data association. Experiments show that our method reaches the level of state-of-the-art, where the MOTA index exceeds FairMOT by 2.5 points, and CenterTrack by 8.4 points on the MOT17 dataset, exceeds FairMOT by 1.6 points on the MOT16 dataset. Code will be avaliable.