 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEvolving Hierarchical Memory-Prediction Machines in Multi-Task Reinforcement Learning
Jun 23, 2021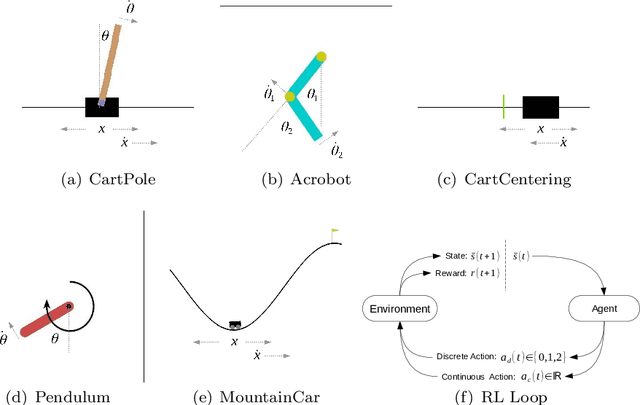
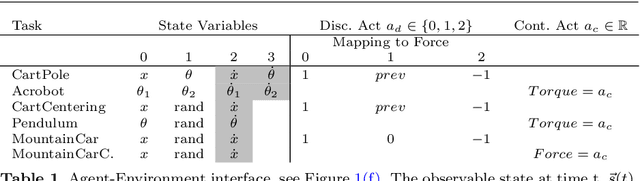
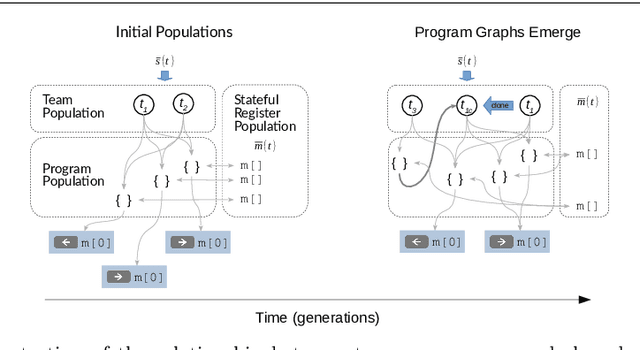
A fundamental aspect of behaviour is the ability to encode salient features of experience in memory and use these memories, in combination with current sensory information, to predict the best action for each situation such that long-term objectives are maximized. The world is highly dynamic, and behavioural agents must generalize across a variety of environments and objectives over time. This scenario can be modeled as a partially-observable multi-task reinforcement learning problem. We use genetic programming to evolve highly-generalized agents capable of operating in six unique environments from the control literature, including OpenAI's entire Classic Control suite. This requires the agent to support discrete and continuous actions simultaneously. No task-identification sensor inputs are provided, thus agents must identify tasks from the dynamics of state variables alone and define control policies for each task. We show that emergent hierarchical structure in the evolving programs leads to multi-task agents that succeed by performing a temporal decomposition and encoding of the problem environments in memory. The resulting agents are competitive with task-specific agents in all six environments. Furthermore, the hierarchical structure of programs allows for dynamic run-time complexity, which results in relatively efficient operation.
The Factory Must Grow: Automation in Factorio
Feb 09, 2021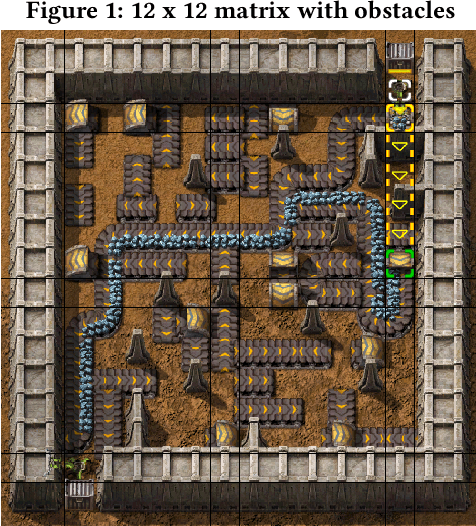
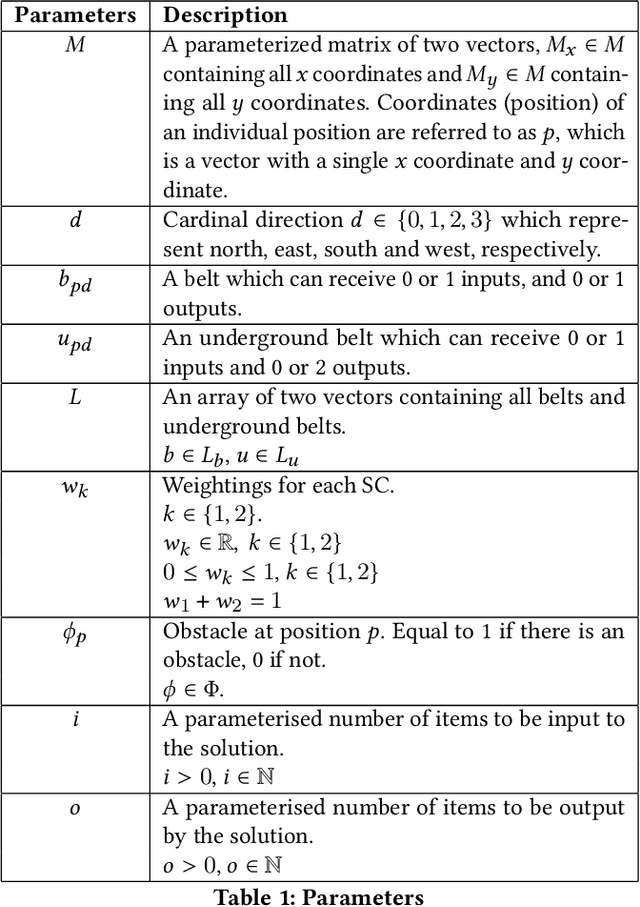
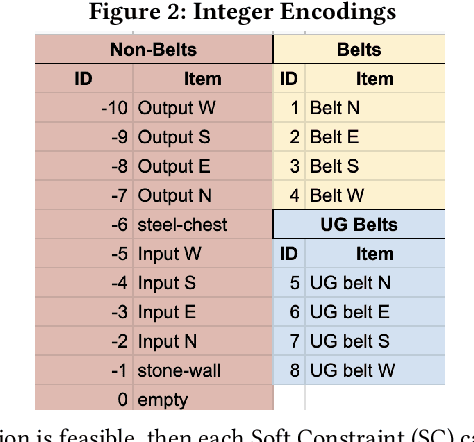
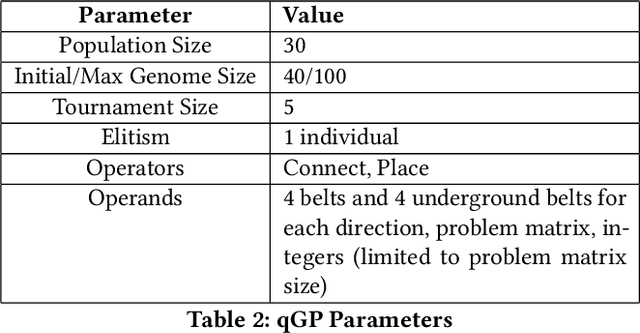
Efficient optimization of resources is paramount to success in many problems faced today. In the field of operational research the efficient scheduling of employees; packing of vans; routing of vehicles; logistics of airlines and transport of materials can be the difference between emission reduction or excess, profits or losses and feasibility or unworkable solutions. The video game Factorio, by Wube Software, has a myriad of problems which are analogous to such real-world problems, and is a useful simulator for developing solutions for these problems. In this paper we define the logistic transport belt problem and define mathematical integer programming model of it. We developed an interface to allow optimizers in any programming language to interact with Factorio, and we provide an initial benchmark of logistic transport belt problems. We present results for Simulated Annealing, quick Genetic Programming and Evolutionary Reinforcement Learning, three different meta-heuristic techniques to optimize this novel problem.