 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTGGLines: A Robust Topological Graph Guided Line Segment Detector for Low Quality Binary Images
Feb 27, 2020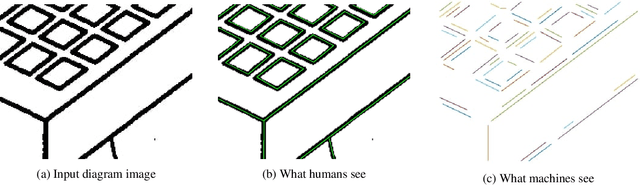
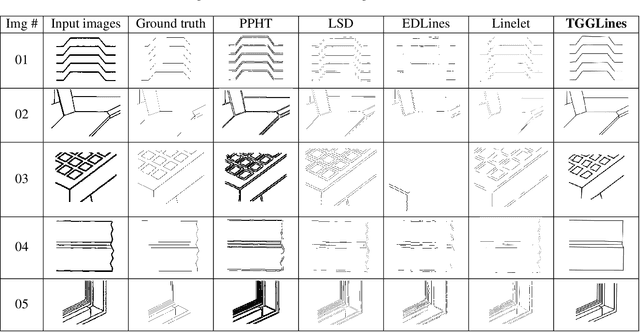
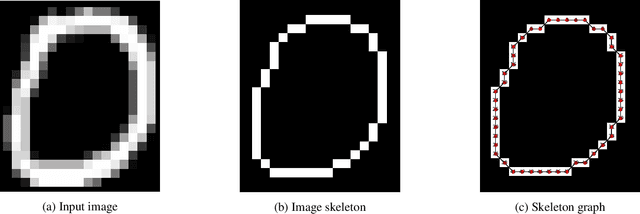
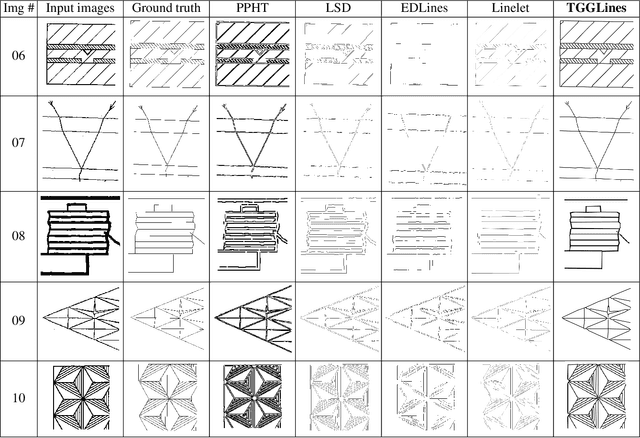
Line segment detection is an essential task in computer vision and image analysis, as it is the critical foundation for advanced tasks such as shape modeling and road lane line detection for autonomous driving. We present a robust topological graph guided approach for line segment detection in low quality binary images (hence, we call it TGGLines). Due to the graph-guided approach, TGGLines not only detects line segments, but also organizes the segments with a line segment connectivity graph, which means the topological relationships (e.g., intersection, an isolated line segment) of the detected line segments are captured and stored; whereas other line detectors only retain a collection of loose line segments. Our empirical results show that the TGGLines detector visually and quantitatively outperforms state-of-the-art line segment detection methods. In addition, our TGGLines approach has the following two competitive advantages: (1) our method only requires one parameter and it is adaptive, whereas almost all other line segment detection methods require multiple (non-adaptive) parameters, and (2) the line segments detected by TGGLines are organized by a line segment connectivity graph.