 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDistributed Universal Adaptive Networks
Jul 07, 2023Adaptive networks (ANs) are effective real time techniques to process and track events observed by sensor networks and, more recently, to equip Internet of Things (IoT) applications. ANs operate over nodes equipped with collaborative adaptive filters that solve distributively an estimation problem common to the whole network. However, they do not guarantee that nodes do not lose from cooperation, as compared to its non-cooperative operation; that poor nodes are rejected and exceptional nodes estimates reach the entire network; and that performance is uniform over all nodes. In order to enforce such properties, this work introduces the concept of distributed universal estimation, which encompasses the new concepts of local universality, global universality and universality with respect to the non-cooperative operation. We then construct a new cooperation protocol that is proven to be distributively universal, outperforming direct competitors from the literature, as shown by several simulations. Mean and mean-square analytical models are developed, with good agreement between theory and simulations.
Combination of LMS Adaptive Filters with Coefficients Feedback
Nov 19, 2017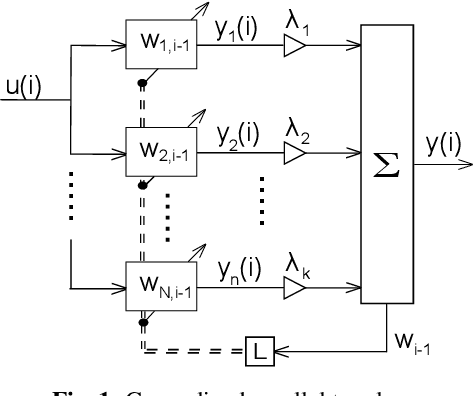
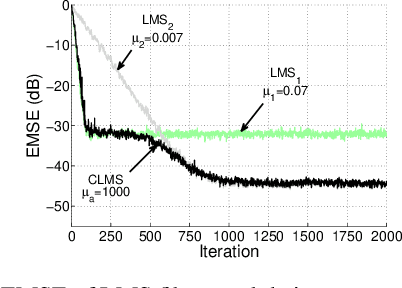
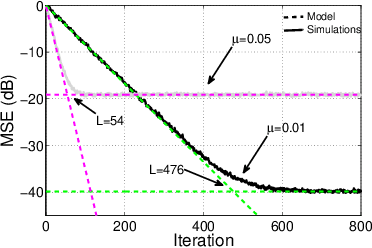
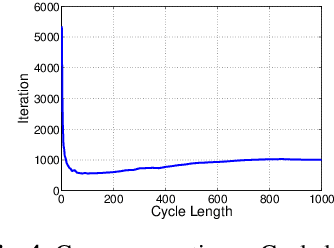
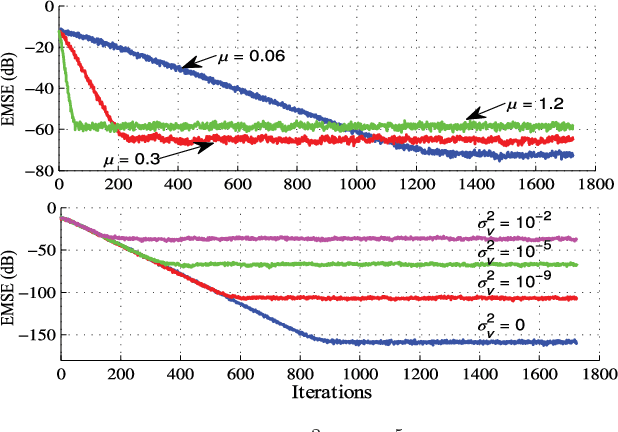
Parallel combinations of adaptive filters have been effectively used to improve the performance of adaptive algorithms and address well-known trade-offs, such as convergence rate vs. steady-state error. Nevertheless, typical combinations suffer from a convergence stagnation issue due to the fact that the component filters run independently. Solutions to this issue usually involve conditional transfers of coefficients between filters, which although effective, are hard to generalize to combinations with more filters or when there is no clearly faster adaptive filter. In this work, a more natural solution is proposed by cyclically feeding back the combined coefficient vector to all component filters. Besides coping with convergence stagnation, this new topology improves tracking and supervisor stability, and bridges an important conceptual gap between combinations of adaptive filters and variable step size schemes. We analyze the steady-state, tracking, and transient performance of this topology for LMS component filters and supervisors with generic activation functions. Numerical examples are used to illustrate how coefficients feedback can improve the performance of parallel combinations at a small computational overhead.
Nonlinear Adaptive Algorithms on Rank-One Tensor Models
Oct 24, 2016
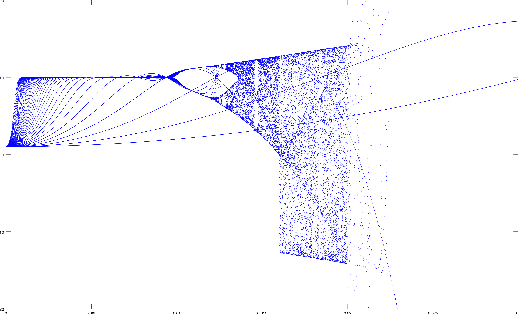
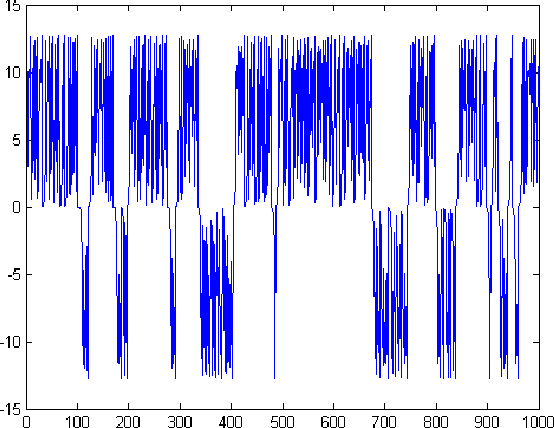
This work proposes a low complexity nonlinearity model and develops adaptive algorithms over it. The model is based on the decomposable---or rank-one, in tensor language---Volterra kernels. It may also be described as a product of FIR filters, which explains its low-complexity. The rank-one model is also interesting because it comes from a well-posed problem in approximation theory. The paper uses such model in an estimation theory context to develop an exact gradient-type algorithm, from which adaptive algorithms such as the least mean squares (LMS) filter and its data-reuse version---the TRUE-LMS---are derived. Stability and convergence issues are addressed. The algorithms are then tested in simulations, which show its good performance when compared to other nonlinear processing algorithms in the literature.
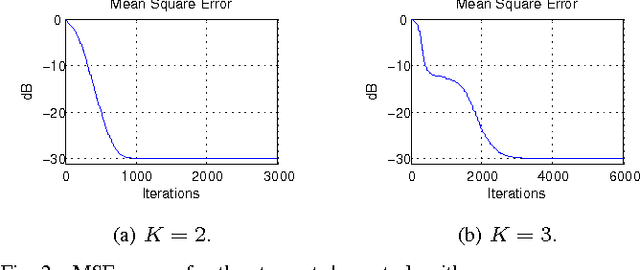
Geometric-Algebra LMS Adaptive Filter and its Application to Rotation Estimation
Jan 22, 2016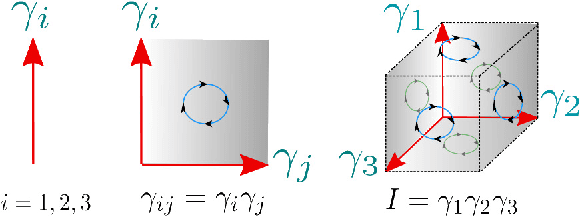
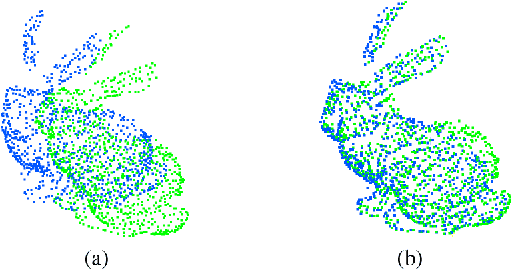
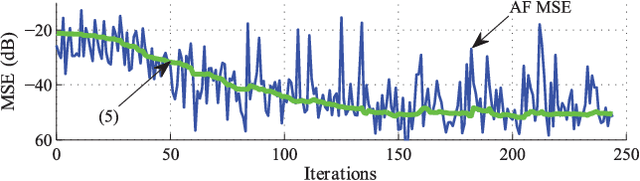
This paper exploits Geometric (Clifford) Algebra (GA) theory in order to devise and introduce a new adaptive filtering strategy. From a least-squares cost function, the gradient is calculated following results from Geometric Calculus (GC), the extension of GA to handle differential and integral calculus. The novel GA least-mean-squares (GA-LMS) adaptive filter, which inherits properties from standard adaptive filters and from GA, is developed to recursively estimate a rotor (multivector), a hypercomplex quantity able to describe rotations in any dimension. The adaptive filter (AF) performance is assessed via a 3D point-clouds registration problem, which contains a rotation estimation step. Calculating the AF computational complexity suggests that it can contribute to reduce the cost of a full-blown 3D registration algorithm, especially when the number of points to be processed grows. Moreover, the employed GA/GC framework allows for easily applying the resulting filter to estimating rotors in higher dimensions.