 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Human Digital Twin Architecture for Knowledge-based Interactions and Context-Aware Conversations
Apr 04, 2025Recent developments in Artificial Intelligence (AI) and Machine Learning (ML) are creating new opportunities for Human-Autonomy Teaming (HAT) in tasks, missions, and continuous coordinated activities. A major challenge is enabling humans to maintain awareness and control over autonomous assets, while also building trust and supporting shared contextual understanding. To address this, we present a real-time Human Digital Twin (HDT) architecture that integrates Large Language Models (LLMs) for knowledge reporting, answering, and recommendation, embodied in a visual interface. The system applies a metacognitive approach to enable personalized, context-aware responses aligned with the human teammate's expectations. The HDT acts as a visually and behaviorally realistic team member, integrated throughout the mission lifecycle, from training to deployment to after-action review. Our architecture includes speech recognition, context processing, AI-driven dialogue, emotion modeling, lip-syncing, and multimodal feedback. We describe the system design, performance metrics, and future development directions for more adaptive and realistic HAT systems.
Towards Next Generation of Pedestrian and Connected Vehicle In-the-loop Research: A Digital Twin Simulation Framework
Dec 08, 2022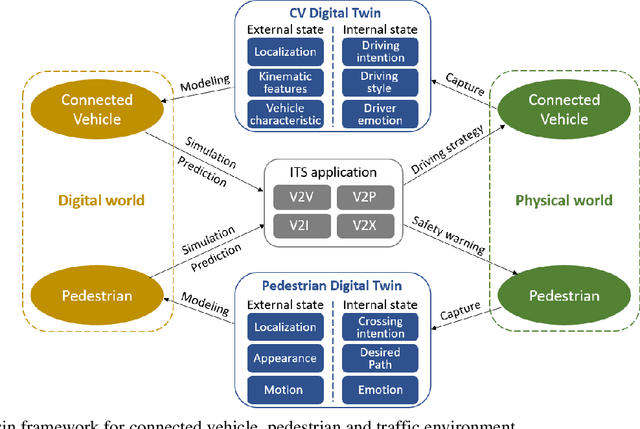
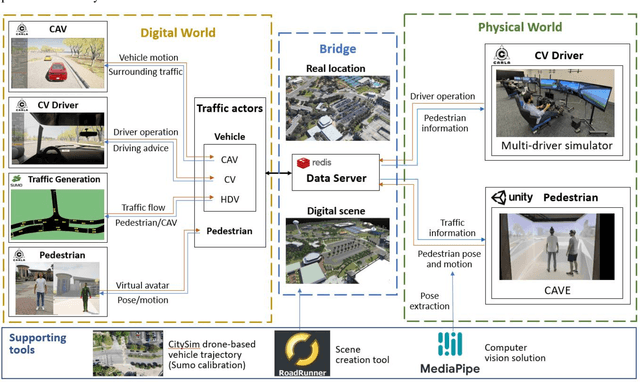
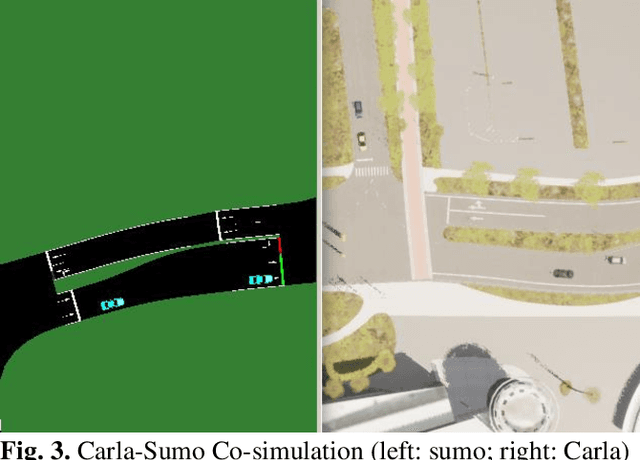
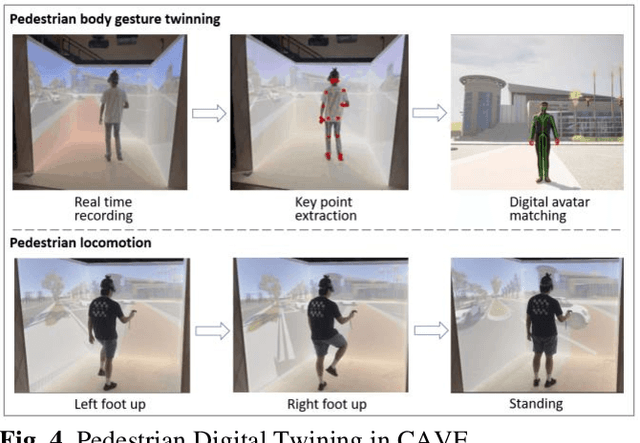
Digital Twin is an emerging technology that replicates real-world entities into a digital space. It has attracted increasing attention in the transportation field and many researchers are exploring its future applications in the development of Intelligent Transportation System (ITS) technologies. Connected vehicles (CVs) and pedestrians are among the major traffic participants in ITS. However, the usage of Digital Twin in research involving both CV and pedestrian remains largely unexplored. In this study, a Digital Twin framework for CV and pedestrian in-the-loop simulation is proposed. The proposed framework consists of the physical world, the digital world, and data transmission in between. The features for the entities (CV and pedestrian) that need digital twined are divided into external state and internal state, and the attributes in each state are described. We also demonstrate a sample architecture under the proposed Digital Twin framework, which is based on Carla-Sumo Co-simulation and Cave automatic virtual environment (CAVE). The proposed framework is expected to provide guidance to the future Digital Twin research, and the architecture we build can serve as the testbed for further research and development of ITS applications on CV and pedestrian.