 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGeoSplat: A Deep Dive into Geometry-Constrained Gaussian Splatting
Sep 05, 2025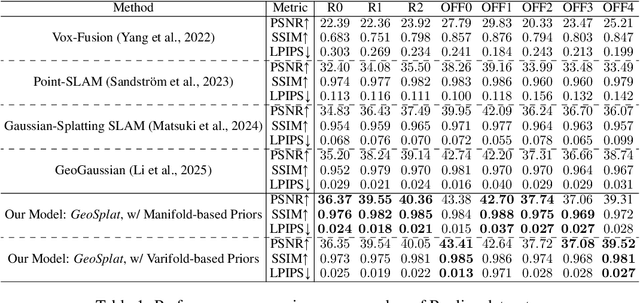
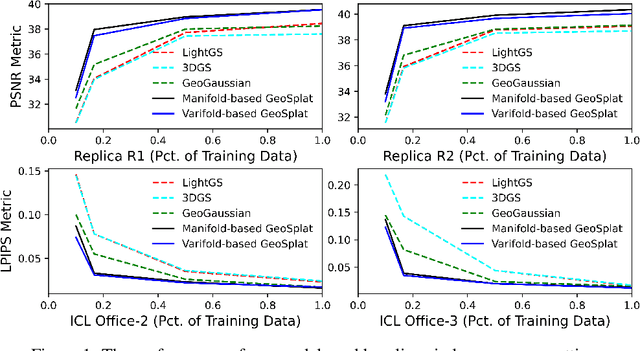
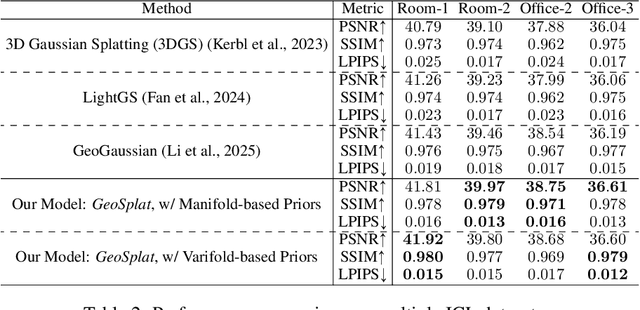
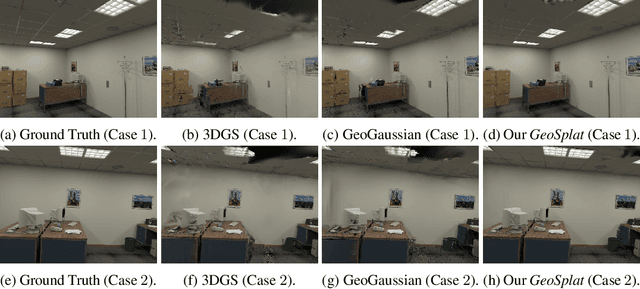
A few recent works explored incorporating geometric priors to regularize the optimization of Gaussian splatting, further improving its performance. However, those early studies mainly focused on the use of low-order geometric priors (e.g., normal vector), and they are also unreliably estimated by noise-sensitive methods, like local principal component analysis. To address their limitations, we first present GeoSplat, a general geometry-constrained optimization framework that exploits both first-order and second-order geometric quantities to improve the entire training pipeline of Gaussian splatting, including Gaussian initialization, gradient update, and densification. As an example, we initialize the scales of 3D Gaussian primitives in terms of principal curvatures, leading to a better coverage of the object surface than random initialization. Secondly, based on certain geometric structures (e.g., local manifold), we introduce efficient and noise-robust estimation methods that provide dynamic geometric priors for our framework. We conduct extensive experiments on multiple datasets for novel view synthesis, showing that our framework: GeoSplat, significantly improves the performance of Gaussian splatting and outperforms previous baselines.
Neural varifolds: an aggregate representation for quantifying the geometry of point clouds
Jul 05, 2024Point clouds are popular 3D representations for real-life objects (such as in LiDAR and Kinect) due to their detailed and compact representation of surface-based geometry. Recent approaches characterise the geometry of point clouds by bringing deep learning based techniques together with geometric fidelity metrics such as optimal transportation costs (e.g., Chamfer and Wasserstein metrics). In this paper, we propose a new surface geometry characterisation within this realm, namely a neural varifold representation of point clouds. Here the surface is represented as a measure/distribution over both point positions and tangent spaces of point clouds. The varifold representation quantifies not only the surface geometry of point clouds through the manifold-based discrimination, but also subtle geometric consistencies on the surface due to the combined product space. This study proposes neural varifold algorithms to compute the varifold norm between two point clouds using neural networks on point clouds and their neural tangent kernel representations. The proposed neural varifold is evaluated on three different sought-after tasks -- shape matching, few-shot shape classification and shape reconstruction. Detailed evaluation and comparison to the state-of-the-art methods demonstrate that the proposed versatile neural varifold is superior in shape matching and few-shot shape classification, and is competitive for shape reconstruction.