 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeScalable and Probabilistically Complete Planning for Robotic Spatial Extrusion
Feb 06, 2020

There is increasing demand for automated systems that can fabricate 3D structures. Robotic spatial extrusion has become an attractive alternative to traditional layer-based 3D printing due to a manipulator's flexibility to print large, directionally-dependent structures. However, existing extrusion planning algorithms require a substantial amount of human input, do not scale to large instances, and lack theoretical guarantees. In this work, we present a rigorous formalization of robotic spatial extrusion planning and provide several efficient and probabilistically complete planning algorithms. The key planning challenge is, throughout the printing process, satisfying both stiffness constraints that limit the deformation of the structure and geometric constraints that ensure the robot does not collide with the structure. We show that, although these constraints often conflict with each other, a greedy backward state-space search guided by a stiffness-aware heuristic is able to successfully balance both constraints. We empirically compare our methods on a benchmark of over 40 simulated extrusion problems. Finally, we apply our approach to 3 real-world extrusion problems.
Automated sequence and motion planning for robotic spatial extrusion of 3D trusses
Mar 11, 2019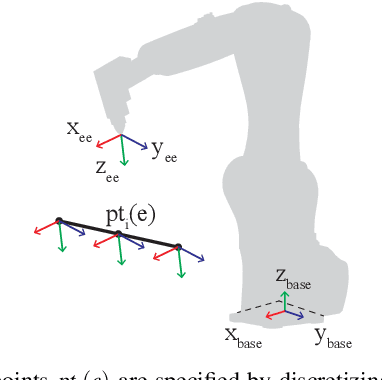
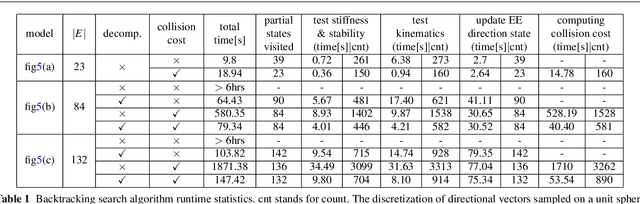
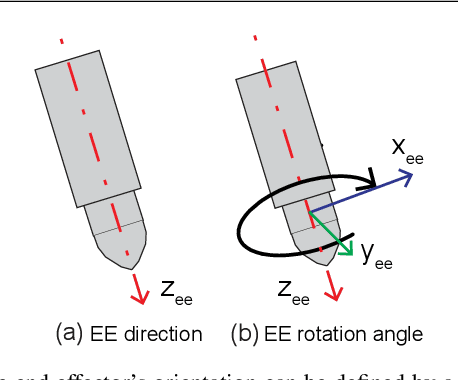
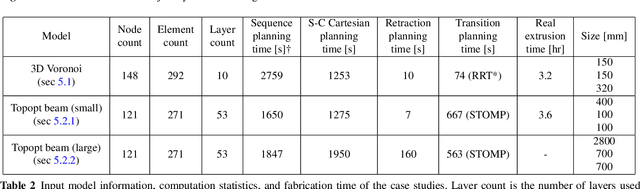
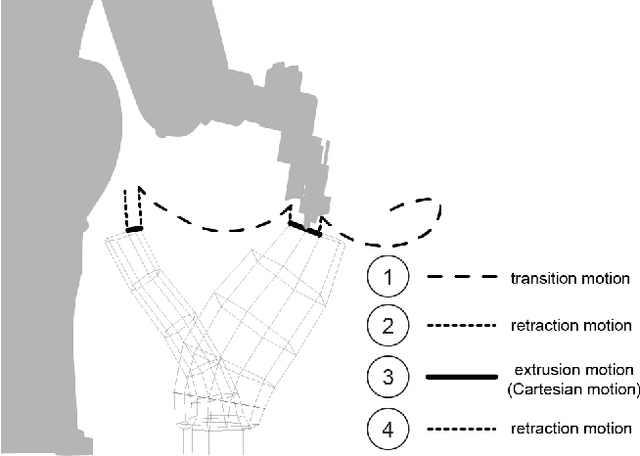
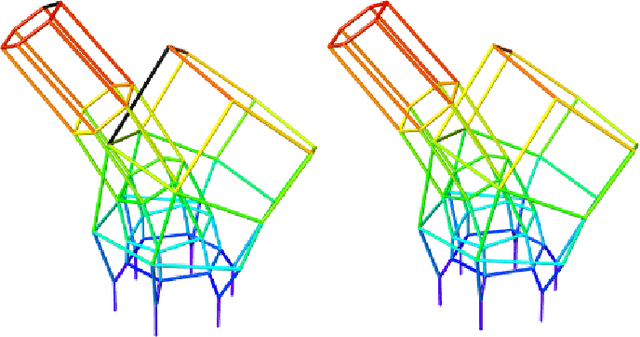
While robotic spatial extrusion has demonstrated a new and efficient means to fabricate 3D truss structures in architectural scale, a major challenge remains in automatically planning extrusion sequence and robotic motion for trusses with unconstrained topologies. This paper presents the first attempt in the field to rigorously formulate the extrusion sequence and motion planning (SAMP) problem, using a CSP encoding. Furthermore, this research proposes a new hierarchical planning framework to solve the extrusion SAMP problems that usually have a long planning horizon and 3D configuration complexity. By decoupling sequence and motion planning, the planning framework is able to efficiently solve the extrusion sequence, end-effector poses, joint configurations, and transition trajectories for spatial trusses with nonstandard topologies. This paper also presents the first detailed computation data to reveal the runtime bottleneck on solving SAMP problems, which provides insight and comparing baseline for future algorithmic development. Together with the algorithmic results, this paper also presents an open-source and modularized software implementation called Choreo that is machine-agnostic. To demonstrate the power of this algorithmic framework, three case studies, including real fabrication and simulation results, are presented.
* 24 pages, 16 figures