 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCP-nets: A Tool for Representing and Reasoning withConditional Ceteris Paribus Preference Statements
Jun 30, 2011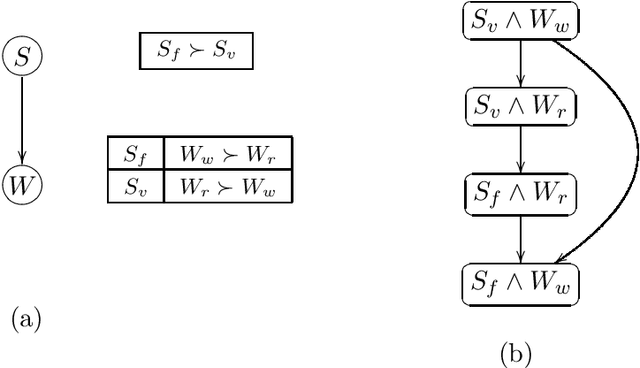
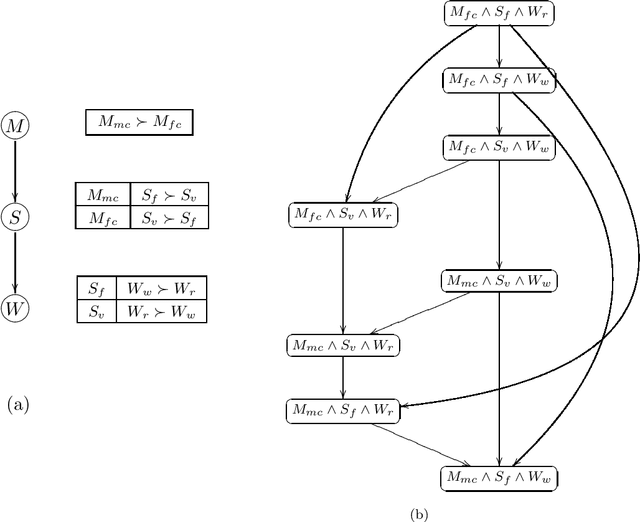
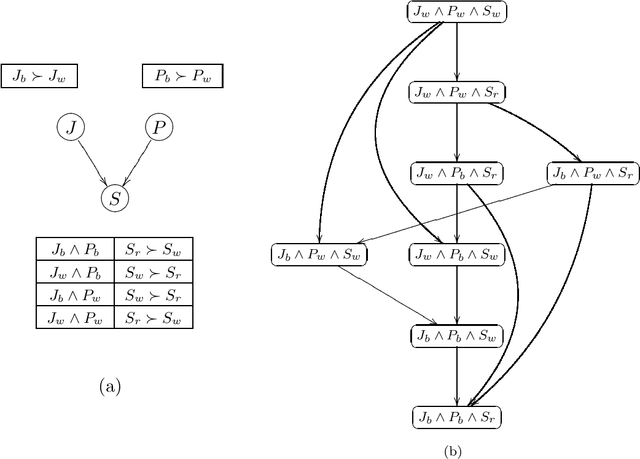
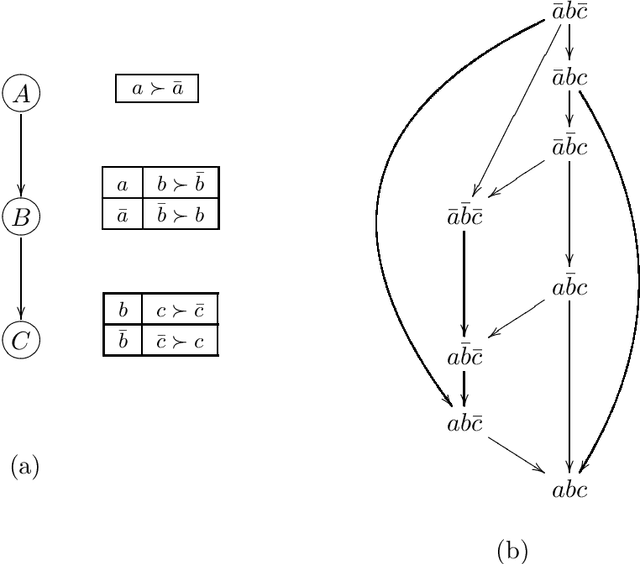
Information about user preferences plays a key role in automated decision making. In many domains it is desirable to assess such preferences in a qualitative rather than quantitative way. In this paper, we propose a qualitative graphical representation of preferences that reflects conditional dependence and independence of preference statements under a ceteris paribus (all else being equal) interpretation. Such a representation is often compact and arguably quite natural in many circumstances. We provide a formal semantics for this model, and describe how the structure of the network can be exploited in several inference tasks, such as determining whether one outcome dominates (is preferred to) another, ordering a set outcomes according to the preference relation, and constructing the best outcome subject to available evidence.
Accelerating Reinforcement Learning through Implicit Imitation
Jun 03, 2011



Imitation can be viewed as a means of enhancing learning in multiagent environments. It augments an agent's ability to learn useful behaviors by making intelligent use of the knowledge implicit in behaviors demonstrated by cooperative teachers or other more experienced agents. We propose and study a formal model of implicit imitation that can accelerate reinforcement learning dramatically in certain cases. Roughly, by observing a mentor, a reinforcement-learning agent can extract information about its own capabilities in, and the relative value of, unvisited parts of the state space. We study two specific instantiations of this model, one in which the learning agent and the mentor have identical abilities, and one designed to deal with agents and mentors with different action sets. We illustrate the benefits of implicit imitation by integrating it with prioritized sweeping, and demonstrating improved performance and convergence through observation of single and multiple mentors. Though we make some stringent assumptions regarding observability and possible interactions, we briefly comment on extensions of the model that relax these restricitions.
Partial-Order Planning with Concurrent Interacting Actions
Jun 01, 2011In order to generate plans for agents with multiple actuators, agent teams, or distributed controllers, we must be able to represent and plan using concurrent actions with interacting effects. This has historically been considered a challenging task requiring a temporal planner with the ability to reason explicitly about time. We show that with simple modifications, the STRIPS action representation language can be used to represent interacting actions. Moreover, algorithms for partial-order planning require only small modifications in order to be applied in such multiagent domains. We demonstrate this fact by developing a sound and complete partial-order planner for planning with concurrent interacting actions, POMP, that extends existing partial-order planners in a straightforward way. These results open the way to the use of partial-order planners for the centralized control of cooperative multiagent systems.
Decision-Theoretic Planning: Structural Assumptions and Computational Leverage
May 27, 2011



Planning under uncertainty is a central problem in the study of automated sequential decision making, and has been addressed by researchers in many different fields, including AI planning, decision analysis, operations research, control theory and economics. While the assumptions and perspectives adopted in these areas often differ in substantial ways, many planning problems of interest to researchers in these fields can be modeled as Markov decision processes (MDPs) and analyzed using the techniques of decision theory. This paper presents an overview and synthesis of MDP-related methods, showing how they provide a unifying framework for modeling many classes of planning problems studied in AI. It also describes structural properties of MDPs that, when exhibited by particular classes of problems, can be exploited in the construction of optimal or approximately optimal policies or plans. Planning problems commonly possess structure in the reward and value functions used to describe performance criteria, in the functions used to describe state transitions and observations, and in the relationships among features used to describe states, actions, rewards, and observations. Specialized representations, and algorithms employing these representations, can achieve computational leverage by exploiting these various forms of structure. Certain AI techniques -- in particular those based on the use of structured, intensional representations -- can be viewed in this way. This paper surveys several types of representations for both classical and decision-theoretic planning problems, and planning algorithms that exploit these representations in a number of different ways to ease the computational burden of constructing policies or plans. It focuses primarily on abstraction, aggregation and decomposition techniques based on AI-style representations.