 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMars Terrain Segmentation with Less Labels
Feb 01, 2022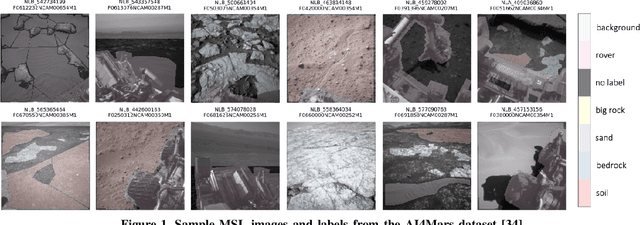


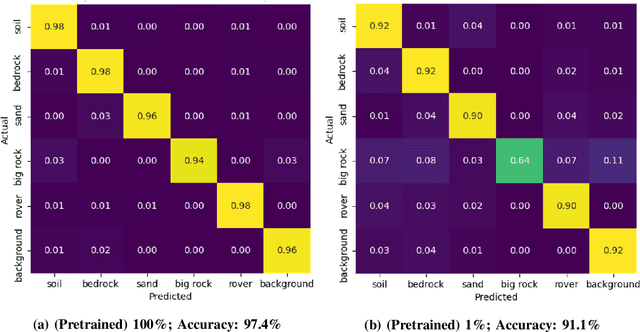
Planetary rover systems need to perform terrain segmentation to identify drivable areas as well as identify specific types of soil for sample collection. The latest Martian terrain segmentation methods rely on supervised learning which is very data hungry and difficult to train where only a small number of labeled samples are available. Moreover, the semantic classes are defined differently for different applications (e.g., rover traversal vs. geological) and as a result the network has to be trained from scratch each time, which is an inefficient use of resources. This research proposes a semi-supervised learning framework for Mars terrain segmentation where a deep segmentation network trained in an unsupervised manner on unlabeled images is transferred to the task of terrain segmentation trained on few labeled images. The network incorporates a backbone module which is trained using a contrastive loss function and an output atrous convolution module which is trained using a pixel-wise cross-entropy loss function. Evaluation results using the metric of segmentation accuracy show that the proposed method with contrastive pretraining outperforms plain supervised learning by 2%-10%. Moreover, the proposed model is able to achieve a segmentation accuracy of 91.1% using only 161 training images (1% of the original dataset) compared to 81.9% with plain supervised learning.
Scheduling the NASA Deep Space Network with Deep Reinforcement Learning
Feb 09, 2021



With three complexes spread evenly across the Earth, NASA's Deep Space Network (DSN) is the primary means of communications as well as a significant scientific instrument for dozens of active missions around the world. A rapidly rising number of spacecraft and increasingly complex scientific instruments with higher bandwidth requirements have resulted in demand that exceeds the network's capacity across its 12 antennae. The existing DSN scheduling process operates on a rolling weekly basis and is time-consuming; for a given week, generation of the final baseline schedule of spacecraft tracking passes takes roughly 5 months from the initial requirements submission deadline, with several weeks of peer-to-peer negotiations in between. This paper proposes a deep reinforcement learning (RL) approach to generate candidate DSN schedules from mission requests and spacecraft ephemeris data with demonstrated capability to address real-world operational constraints. A deep RL agent is developed that takes mission requests for a given week as input, and interacts with a DSN scheduling environment to allocate tracks such that its reward signal is maximized. A comparison is made between an agent trained using Proximal Policy Optimization and its random, untrained counterpart. The results represent a proof-of-concept that, given a well-shaped reward signal, a deep RL agent can learn the complex heuristics used by experts to schedule the DSN. A trained agent can potentially be used to generate candidate schedules to bootstrap the scheduling process and thus reduce the turnaround cycle for DSN scheduling.
MARVIN: An Open Machine Learning Corpus and Environment for Automated Machine Learning Primitive Annotation and Execution
Aug 11, 2018


In this demo paper, we introduce the DARPA D3M program for automatic machine learning (ML) and JPL's MARVIN tool that provides an environment to locate, annotate, and execute machine learning primitives for use in ML pipelines. MARVIN is a web-based application and associated back-end interface written in Python that enables composition of ML pipelines from hundreds of primitives from the world of Scikit-Learn, Keras, DL4J and other widely used libraries. MARVIN allows for the creation of Docker containers that run on Kubernetes clusters within DARPA to provide an execution environment for automated machine learning. MARVIN currently contains over 400 datasets and challenge problems from a wide array of ML domains including routine classification and regression to advanced video/image classification and remote sensing.