 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMars Terrain Segmentation with Less Labels
Paper and Code
Feb 01, 2022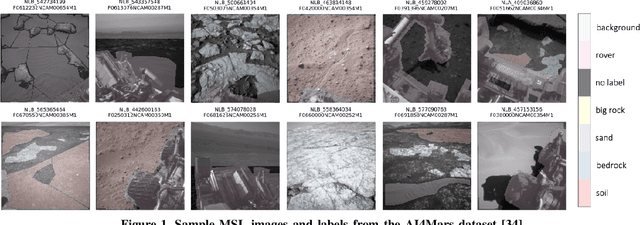


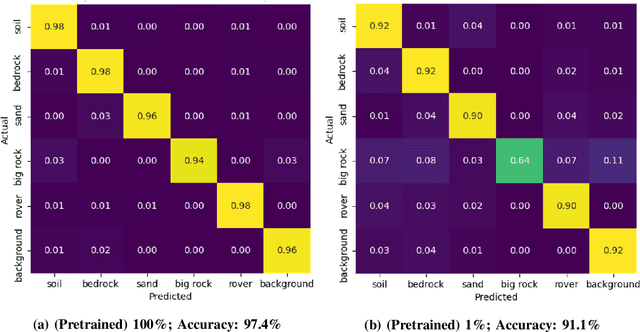
Planetary rover systems need to perform terrain segmentation to identify drivable areas as well as identify specific types of soil for sample collection. The latest Martian terrain segmentation methods rely on supervised learning which is very data hungry and difficult to train where only a small number of labeled samples are available. Moreover, the semantic classes are defined differently for different applications (e.g., rover traversal vs. geological) and as a result the network has to be trained from scratch each time, which is an inefficient use of resources. This research proposes a semi-supervised learning framework for Mars terrain segmentation where a deep segmentation network trained in an unsupervised manner on unlabeled images is transferred to the task of terrain segmentation trained on few labeled images. The network incorporates a backbone module which is trained using a contrastive loss function and an output atrous convolution module which is trained using a pixel-wise cross-entropy loss function. Evaluation results using the metric of segmentation accuracy show that the proposed method with contrastive pretraining outperforms plain supervised learning by 2%-10%. Moreover, the proposed model is able to achieve a segmentation accuracy of 91.1% using only 161 training images (1% of the original dataset) compared to 81.9% with plain supervised learning.