 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeNon-Conservative Obstacle Avoidance for Multi-Body Systems Leveraging Convex Hulls and Predicted Closest Points
Oct 16, 2024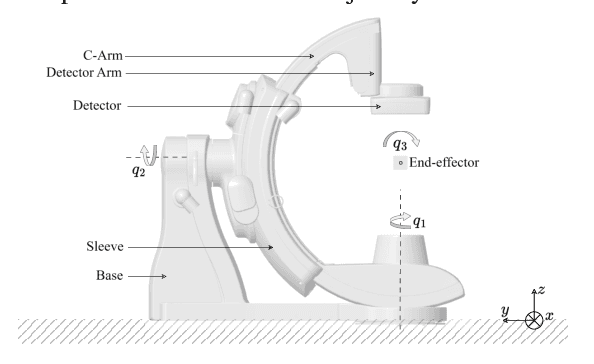
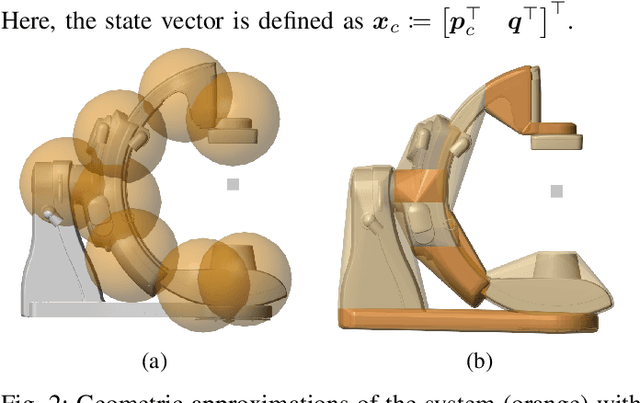
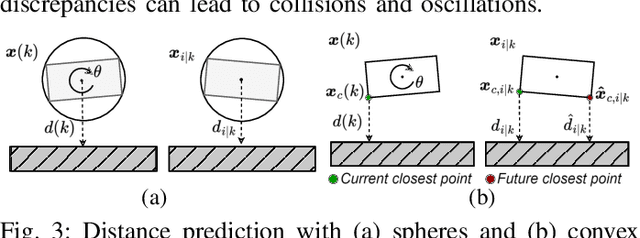
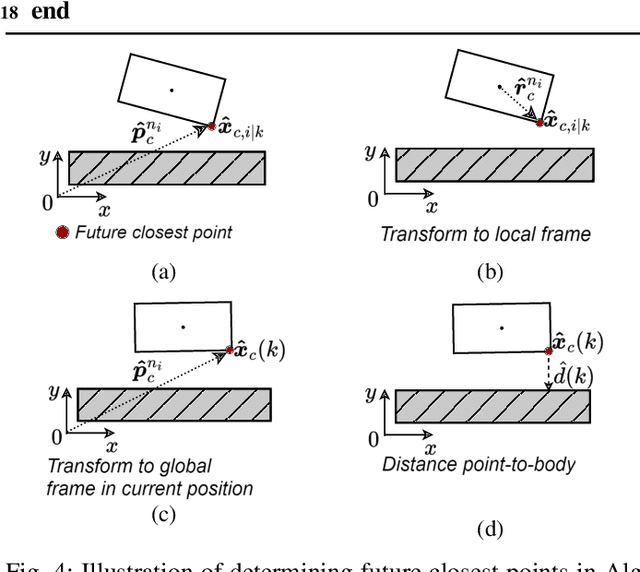
This paper introduces a novel approach that integrates future closest point predictions into the distance constraints of a collision avoidance controller, leveraging convex hulls with closest point distance calculations. By addressing abrupt shifts in closest points, this method effectively reduces collision risks and enhances controller performance. Applied to an Image Guided Therapy robot and validated through simulations and user experiments, the framework demonstrates improved distance prediction accuracy, smoother trajectories, and safer navigation near obstacles.
A Bayesian optimization framework for the automatic tuning of MPC-based shared controllers
Nov 02, 2023
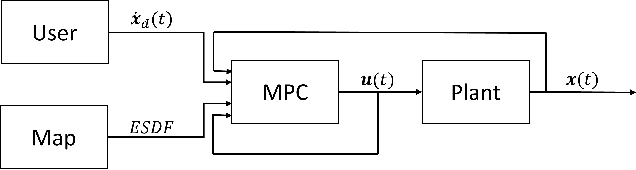

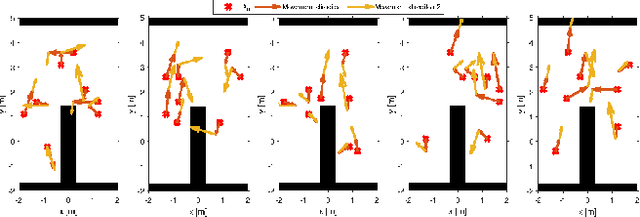
This paper presents a Bayesian optimization framework for the automatic tuning of shared controllers which are defined as a Model Predictive Control (MPC) problem. The proposed framework includes the design of performance metrics as well as the representation of user inputs for simulation-based optimization. The framework is applied to the optimization of a shared controller for an Image Guided Therapy robot. VR-based user experiments confirm the increase in performance of the automatically tuned MPC shared controller with respect to a hand-tuned baseline version as well as its generalization ability.