Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Bayesian optimization framework for the automatic tuning of MPC-based shared controllers
Paper and Code
Nov 02, 2023
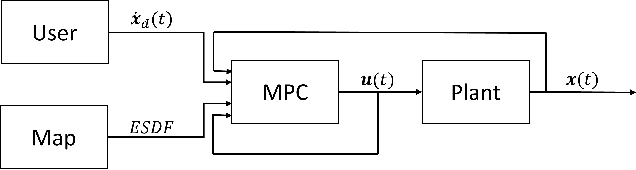

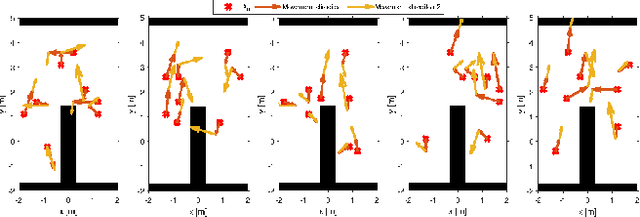
This paper presents a Bayesian optimization framework for the automatic tuning of shared controllers which are defined as a Model Predictive Control (MPC) problem. The proposed framework includes the design of performance metrics as well as the representation of user inputs for simulation-based optimization. The framework is applied to the optimization of a shared controller for an Image Guided Therapy robot. VR-based user experiments confirm the increase in performance of the automatically tuned MPC shared controller with respect to a hand-tuned baseline version as well as its generalization ability.
View paper on