 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeApproximate Joint Diagonalization and Geometric Mean of Symmetric Positive Definite Matrices
May 26, 2015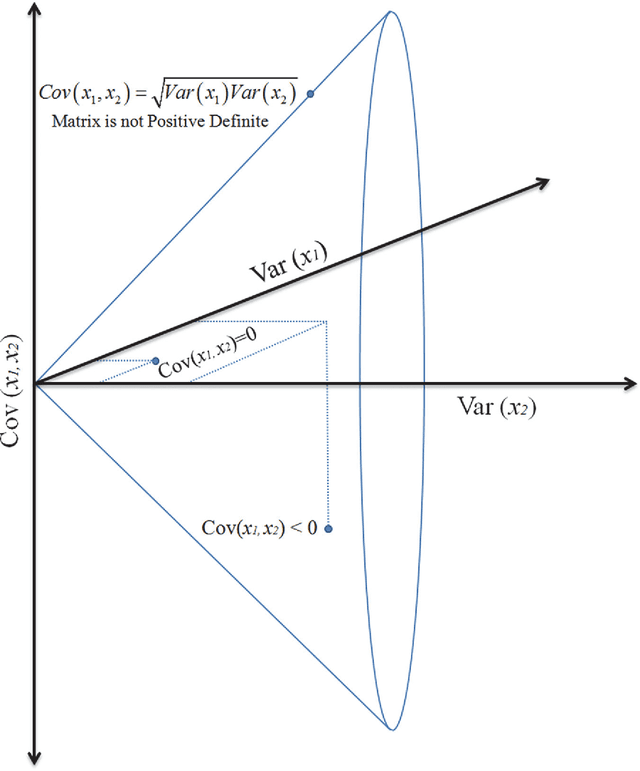
We explore the connection between two problems that have arisen independently in the signal processing and related fields: the estimation of the geometric mean of a set of symmetric positive definite (SPD) matrices and their approximate joint diagonalization (AJD). Today there is a considerable interest in estimating the geometric mean of a SPD matrix set in the manifold of SPD matrices endowed with the Fisher information metric. The resulting mean has several important invariance properties and has proven very useful in diverse engineering applications such as biomedical and image data processing. While for two SPD matrices the mean has an algebraic closed form solution, for a set of more than two SPD matrices it can only be estimated by iterative algorithms. However, none of the existing iterative algorithms feature at the same time fast convergence, low computational complexity per iteration and guarantee of convergence. For this reason, recently other definitions of geometric mean based on symmetric divergence measures, such as the Bhattacharyya divergence, have been considered. The resulting means, although possibly useful in practice, do not satisfy all desirable invariance properties. In this paper we consider geometric means of co-variance matrices estimated on high-dimensional time-series, assuming that the data is generated according to an instantaneous mixing model, which is very common in signal processing. We show that in these circumstances we can approximate the Fisher information geometric mean by employing an efficient AJD algorithm. Our approximation is in general much closer to the Fisher information geometric mean as compared to its competitors and verifies many invariance properties. Furthermore, convergence is guaranteed, the computational complexity is low and the convergence rate is quadratic. The accuracy of this new geometric mean approximation is demonstrated by means of simulations.
On The Convergence of Gradient Descent for Finding the Riemannian Center of Mass
Dec 30, 2011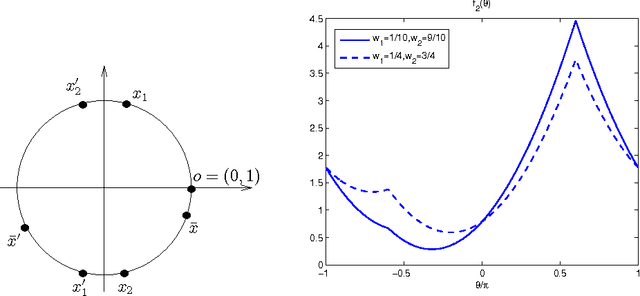
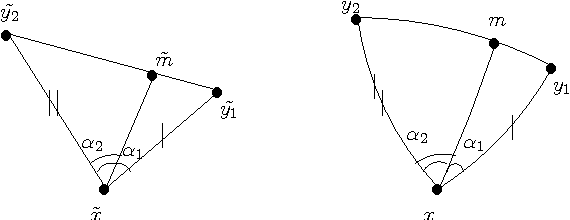
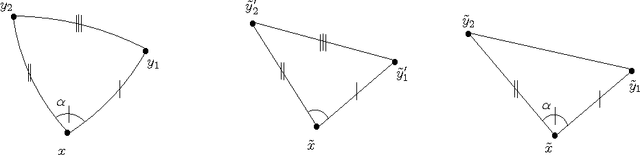
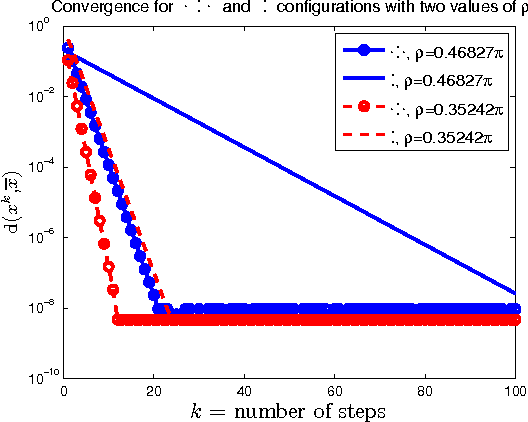
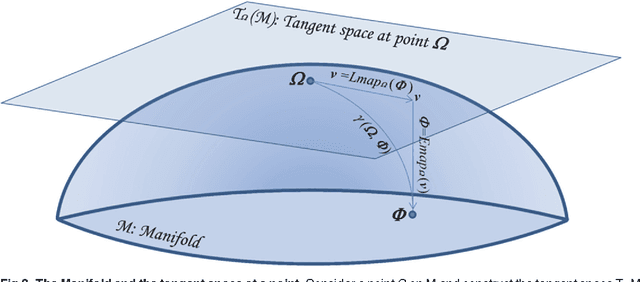
We study the problem of finding the global Riemannian center of mass of a set of data points on a Riemannian manifold. Specifically, we investigate the convergence of constant step-size gradient descent algorithms for solving this problem. The challenge is that often the underlying cost function is neither globally differentiable nor convex, and despite this one would like to have guaranteed convergence to the global minimizer. After some necessary preparations we state a conjecture which we argue is the best (in a sense described) convergence condition one can hope for. The conjecture specifies conditions on the spread of the data points, step-size range, and the location of the initial condition (i.e., the region of convergence) of the algorithm. These conditions depend on the topology and the curvature of the manifold and can be conveniently described in terms of the injectivity radius and the sectional curvatures of the manifold. For manifolds of constant nonnegative curvature (e.g., the sphere and the rotation group in $\mathbb{R}^{3}$) we show that the conjecture holds true (we do this by proving and using a comparison theorem which seems to be of a different nature from the standard comparison theorems in Riemannian geometry). For manifolds of arbitrary curvature we prove convergence results which are weaker than the conjectured one (but still superior over the available results). We also briefly study the effect of the configuration of the data points on the speed of convergence.