 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEfficient and Robust Semantic Mapping for Indoor Environments
Mar 11, 2022
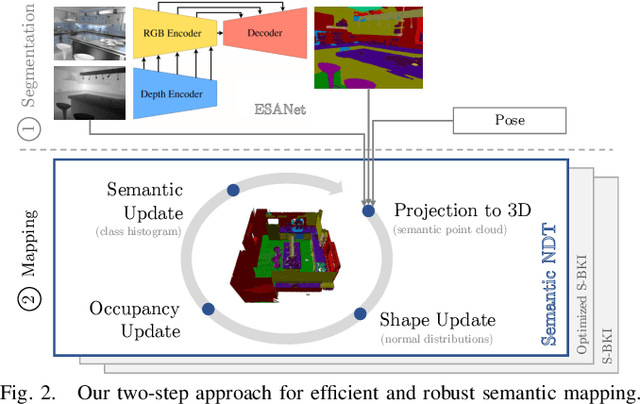
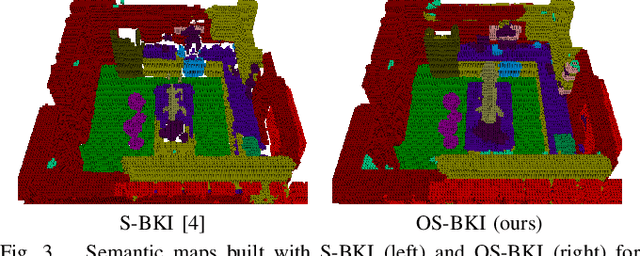
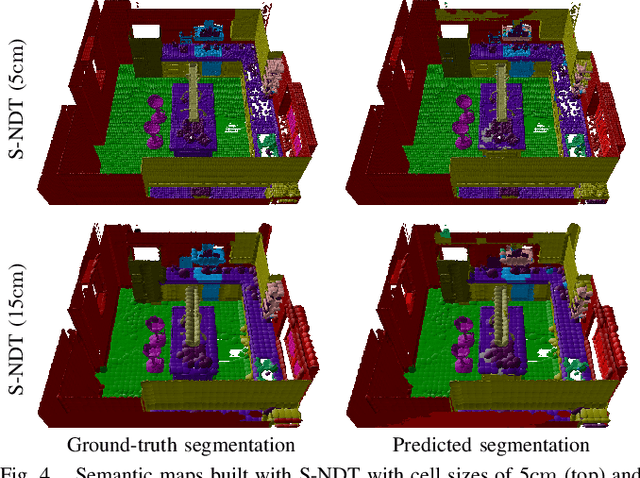
A key proficiency an autonomous mobile robot must have to perform high-level tasks is a strong understanding of its environment. This involves information about what types of objects are present, where they are, what their spatial extend is, and how they can be reached, i.e., information about free space is also crucial. Semantic maps are a powerful instrument providing such information. However, applying semantic segmentation and building 3D maps with high spatial resolution is challenging given limited resources on mobile robots. In this paper, we incorporate semantic information into efficient occupancy normal distribution transform (NDT) maps to enable real-time semantic mapping on mobile robots. On the publicly available dataset Hypersim, we show that, due to their sub-voxel accuracy, semantic NDT maps are superior to other approaches. We compare them to the recent state-of-the-art approach based on voxels and semantic Bayesian spatial kernel inference~(S-BKI) and to an optimized version of it derived in this paper. The proposed semantic NDT maps can represent semantics to the same level of detail, while mapping is 2.7 to 17.5 times faster. For the same grid resolution, they perform significantly better, while mapping is up to more than 5 times faster. Finally, we prove the real-world applicability of semantic NDT maps with qualitative results in a domestic application.
Efficient RGB-D Semantic Segmentation for Indoor Scene Analysis
Nov 13, 2020
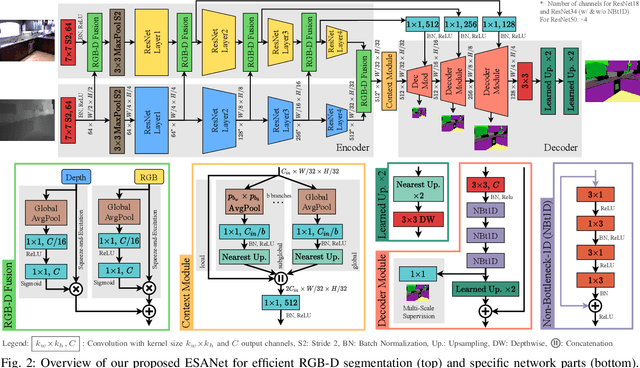
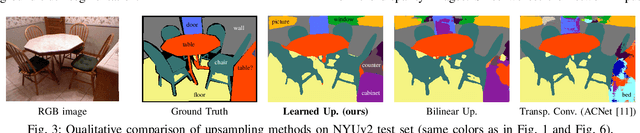
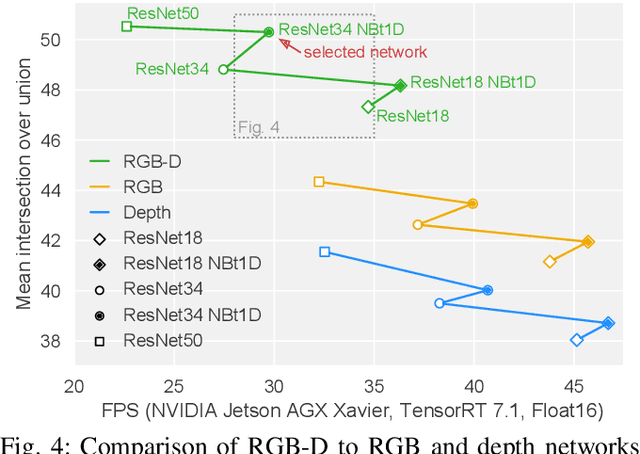
Analyzing scenes thoroughly is crucial for mobile robots acting in different environments. Semantic segmentation can enhance various subsequent tasks, such as (semantically assisted) person perception, (semantic) free space detection, (semantic) mapping, and (semantic) navigation. In this paper, we propose an efficient and robust RGB-D segmentation approach that can be optimized to a high degree using NVIDIA TensorRT and, thus, is well suited as a common initial processing step in a complex system for scene analysis on mobile robots. We show that RGB-D segmentation is superior to processing RGB images solely and that it can still be performed in real time if the network architecture is carefully designed. We evaluate our proposed Efficient Scene Analysis Network (ESANet) on the common indoor datasets NYUv2 and SUNRGB-D and show that it reaches state-of-the-art performance when considering both segmentation performance and runtime. Furthermore, our evaluation on the outdoor dataset Cityscapes shows that our approach is suitable for other areas of application as well. Finally, instead of presenting benchmark results only, we show qualitative results in one of our indoor application scenarios.