 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGradient Boosting Reinforcement Learning
Jul 11, 2024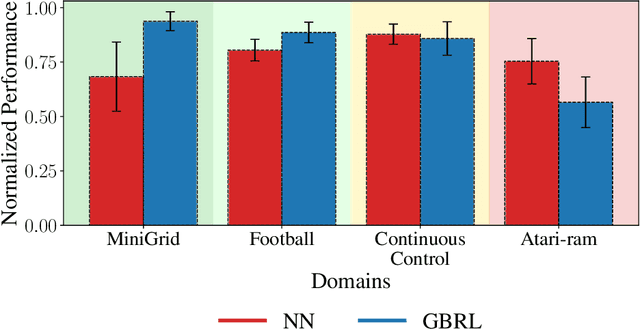
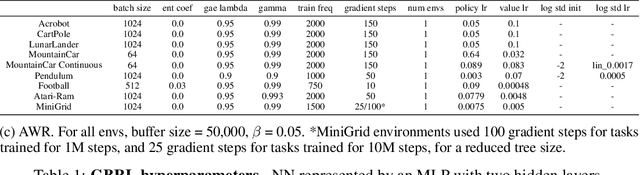
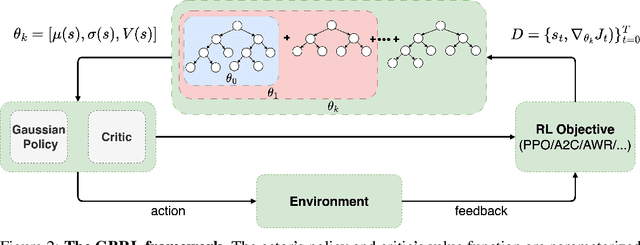

Neural networks (NN) achieve remarkable results in various tasks, but lack key characteristics: interpretability, support for categorical features, and lightweight implementations suitable for edge devices. While ongoing efforts aim to address these challenges, Gradient Boosting Trees (GBT) inherently meet these requirements. As a result, GBTs have become the go-to method for supervised learning tasks in many real-world applications and competitions. However, their application in online learning scenarios, notably in reinforcement learning (RL), has been limited. In this work, we bridge this gap by introducing Gradient-Boosting RL (GBRL), a framework that extends the advantages of GBT to the RL domain. Using the GBRL framework, we implement various actor-critic algorithms and compare their performance with their NN counterparts. Inspired by shared backbones in NN we introduce a tree-sharing approach for policy and value functions with distinct learning rates, enhancing learning efficiency over millions of interactions. GBRL achieves competitive performance across a diverse array of tasks, excelling in domains with structured or categorical features. Additionally, we present a high-performance, GPU-accelerated implementation that integrates seamlessly with widely-used RL libraries (available at https://github.com/NVlabs/gbrl). GBRL expands the toolkit for RL practitioners, demonstrating the viability and promise of GBT within the RL paradigm, particularly in domains characterized by structured or categorical features.
Implementing Reinforcement Learning Datacenter Congestion Control in NVIDIA NICs
Jul 05, 2022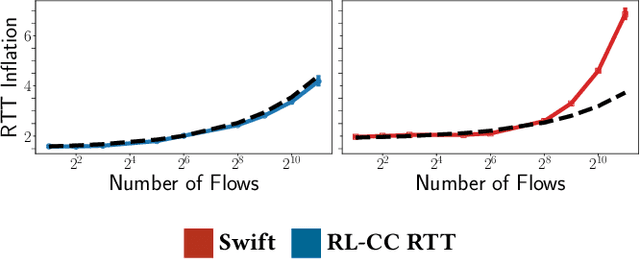

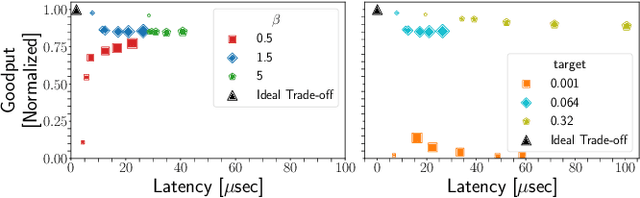
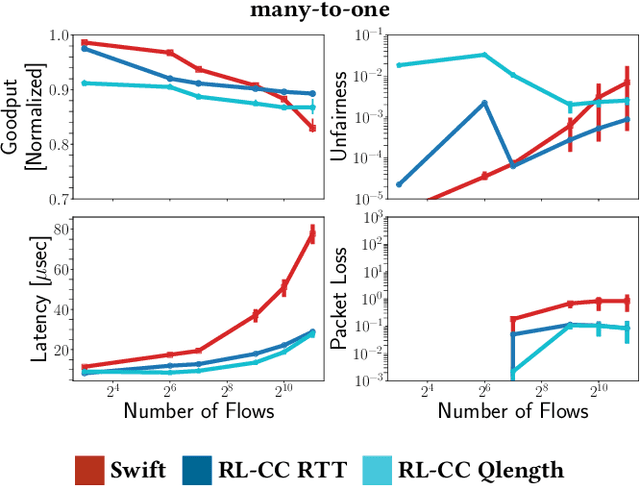
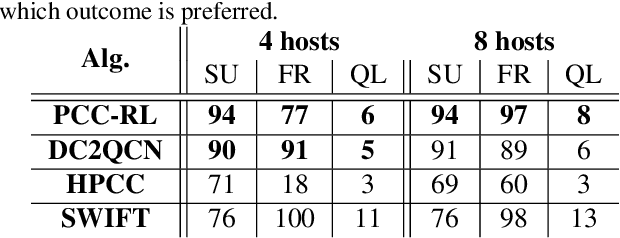
Cloud datacenters are exponentially growing both in numbers and size. This increase results in a network activity surge that warrants better congestion avoidance. The resulting challenge is two-fold: (i) designing algorithms that can be custom-tuned to the complex traffic patterns of a given datacenter; but, at the same time (ii) run on low-level hardware with the required low latency of effective Congestion Control (CC). In this work, we present a Reinforcement Learning (RL) based CC solution that learns from certain traffic scenarios and successfully generalizes to others. We then distill the RL neural network policy into binary decision trees to achieve the desired $\mu$sec decision latency required for real-time inference with RDMA. We deploy the distilled policy on NVIDIA NICs in a real network and demonstrate state-of-the-art performance, balancing all tested metrics simultaneously: bandwidth, latency, fairness, and packet drops.
Reinforcement Learning for Datacenter Congestion Control
Feb 18, 2021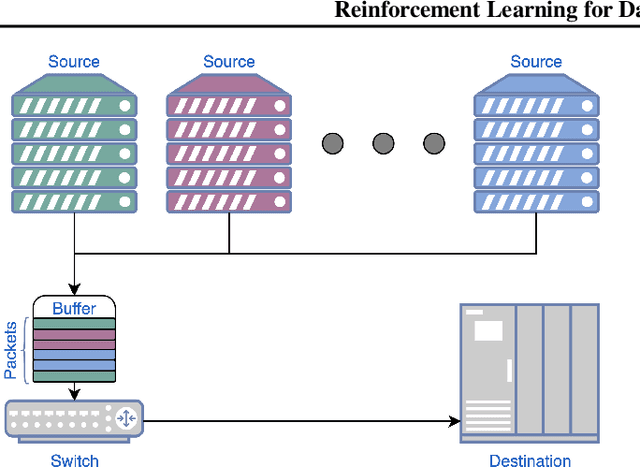

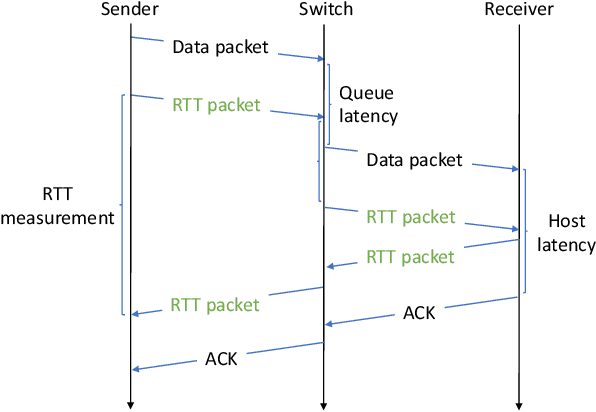
We approach the task of network congestion control in datacenters using Reinforcement Learning (RL). Successful congestion control algorithms can dramatically improve latency and overall network throughput. Until today, no such learning-based algorithms have shown practical potential in this domain. Evidently, the most popular recent deployments rely on rule-based heuristics that are tested on a predetermined set of benchmarks. Consequently, these heuristics do not generalize well to newly-seen scenarios. Contrarily, we devise an RL-based algorithm with the aim of generalizing to different configurations of real-world datacenter networks. We overcome challenges such as partial-observability, non-stationarity, and multi-objectiveness. We further propose a policy gradient algorithm that leverages the analytical structure of the reward function to approximate its derivative and improve stability. We show that this scheme outperforms alternative popular RL approaches, and generalizes to scenarios that were not seen during training. Our experiments, conducted on a realistic simulator that emulates communication networks' behavior, exhibit improved performance concurrently on the multiple considered metrics compared to the popular algorithms deployed today in real datacenters. Our algorithm is being productized to replace heuristics in some of the largest datacenters in the world.