 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeClass-Aware PillarMix: Can Mixed Sample Data Augmentation Enhance 3D Object Detection with Radar Point Clouds?
Mar 04, 2025

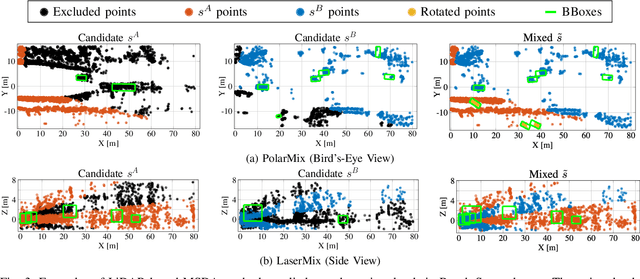

Due to the significant effort required for data collection and annotation in 3D perception tasks, mixed sample data augmentation (MSDA) has been widely studied to generate diverse training samples by mixing existing data. Recently, many MSDA techniques have been developed for point clouds, but they mainly target LiDAR data, leaving their application to radar point clouds largely unexplored. In this paper, we examine the feasibility of applying existing MSDA methods to radar point clouds and identify several challenges in adapting these techniques. These obstacles stem from the radar's irregular angular distribution, deviations from a single-sensor polar layout in multi-radar setups, and point sparsity. To address these issues, we propose Class-Aware PillarMix (CAPMix), a novel MSDA approach that applies MixUp at the pillar level in 3D point clouds, guided by class labels. Unlike methods that rely a single mix ratio to the entire sample, CAPMix assigns an independent ratio to each pillar, boosting sample diversity. To account for the density of different classes, we use class-specific distributions: for dense objects (e.g., large vehicles), we skew ratios to favor points from another sample, while for sparse objects (e.g., pedestrians), we sample more points from the original. This class-aware mixing retains critical details and enriches each sample with new information, ultimately generating more diverse training data. Experimental results demonstrate that our method not only significantly boosts performance but also outperforms existing MSDA approaches across two datasets (Bosch Street and K-Radar). We believe that this straightforward yet effective approach will spark further investigation into MSDA techniques for radar data.
Exploring Domain Shift on Radar-Based 3D Object Detection Amidst Diverse Environmental Conditions
Aug 13, 2024



The rapid evolution of deep learning and its integration with autonomous driving systems have led to substantial advancements in 3D perception using multimodal sensors. Notably, radar sensors show greater robustness compared to cameras and lidar under adverse weather and varying illumination conditions. This study delves into the often-overlooked yet crucial issue of domain shift in 4D radar-based object detection, examining how varying environmental conditions, such as different weather patterns and road types, impact 3D object detection performance. Our findings highlight distinct domain shifts across various weather scenarios, revealing unique dataset sensitivities that underscore the critical role of radar point cloud generation. Additionally, we demonstrate that transitioning between different road types, especially from highways to urban settings, introduces notable domain shifts, emphasizing the necessity for diverse data collection across varied road environments. To the best of our knowledge, this is the first comprehensive analysis of domain shift effects on 4D radar-based object detection. We believe this empirical study contributes to understanding the complex nature of domain shifts in radar data and suggests paths forward for data collection strategy in the face of environmental variability.