 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEnvy-Free but Still Unfair: Envy-Freeness Up To One Item (EF-1) in Personalized Recommendation
Sep 10, 2025Envy-freeness and the relaxation to Envy-freeness up to one item (EF-1) have been used as fairness concepts in the economics, game theory, and social choice literatures since the 1960s, and have recently gained popularity within the recommendation systems communities. In this short position paper we will give an overview of envy-freeness and its use in economics and recommendation systems; and illustrate why envy is not appropriate to measure fairness for use in settings where personalization plays a role.
What Voting Rules Actually Do: A Data-Driven Analysis of Multi-Winner Voting
Aug 08, 2025Committee-selection problems arise in many contexts and applications, and there has been increasing interest within the social choice research community on identifying which properties are satisfied by different multi-winner voting rules. In this work, we propose a data-driven framework to evaluate how frequently voting rules violate axioms across diverse preference distributions in practice, shifting away from the binary perspective of axiom satisfaction given by worst-case analysis. Using this framework, we analyze the relationship between multi-winner voting rules and their axiomatic performance under several preference distributions. We then show that neural networks, acting as voting rules, can outperform traditional rules in minimizing axiom violations. Our results suggest that data-driven approaches to social choice can inform the design of new voting systems and support the continuation of data-driven research in social choice.
Automation from the Worker's Perspective
Sep 30, 2024
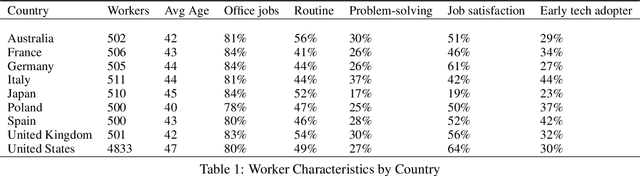
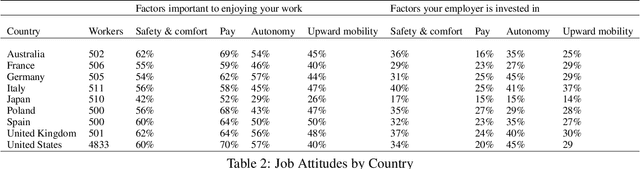
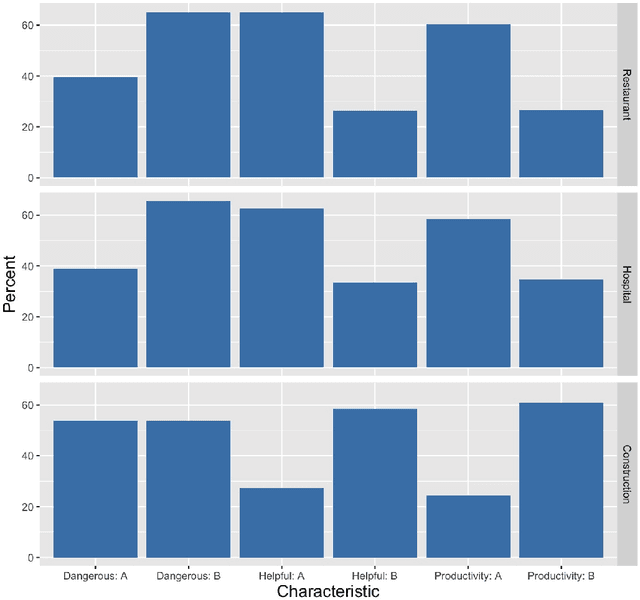
Common narratives about automation often pit new technologies against workers. The introduction of advanced machine tools, industrial robots, and AI have all been met with concern that technological progress will mean fewer jobs. However, workers themselves offer a more optimistic, nuanced perspective. Drawing on a far-reaching 2024 survey of more than 9,000 workers across nine countries, this paper finds that more workers report potential benefits from new technologies like robots and AI for their safety and comfort at work, their pay, and their autonomy on the job than report potential costs. Workers with jobs that ask them to solve complex problems, workers who feel valued by their employers, and workers who are motivated to move up in their careers are all more likely to see new technologies as beneficial. In contrast to assumptions in previous research, more formal education is in some cases associated with more negative attitudes toward automation and its impact on work. In an experimental setting, the prospect of financial incentives for workers improve their perceptions of automation technologies, whereas the prospect of increased input about how new technologies are used does not have a significant effect on workers' attitudes toward automation.
Liquid Ensemble Selection for Continual Learning
May 12, 2024Continual learning aims to enable machine learning models to continually learn from a shifting data distribution without forgetting what has already been learned. Such shifting distributions can be broken into disjoint subsets of related examples; by training each member of an ensemble on a different subset it is possible for the ensemble as a whole to achieve much higher accuracy with less forgetting than a naive model. We address the problem of selecting which models within an ensemble should learn on any given data, and which should predict. By drawing on work from delegative voting we develop an algorithm for using delegation to dynamically select which models in an ensemble are active. We explore a variety of delegation methods and performance metrics, ultimately finding that delegation is able to provide a significant performance boost over naive learning in the face of distribution shifts.
Liquid Democracy for Low-Cost Ensemble Pruning
Jan 30, 2024We argue that there is a strong connection between ensemble learning and a delegative voting paradigm -- liquid democracy -- that can be leveraged to reduce ensemble training costs. We present an incremental training procedure that identifies and removes redundant classifiers from an ensemble via delegation mechanisms inspired by liquid democracy. Through both analysis and extensive experiments we show that this process greatly reduces the computational cost of training compared to training a full ensemble. By carefully selecting the underlying delegation mechanism, weight centralization in the classifier population is avoided, leading to higher accuracy than some boosting methods. Furthermore, this work serves as an exemplar of how frameworks from computational social choice literature can be applied to problems in nontraditional domains.