 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCapturability-based Pattern Generation for Walking with Variable Height
Oct 25, 2018



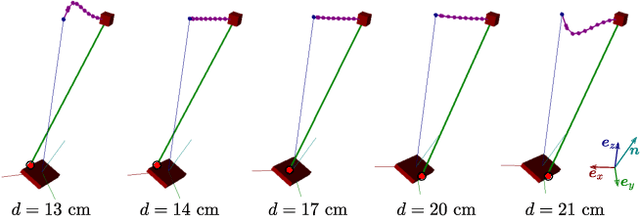
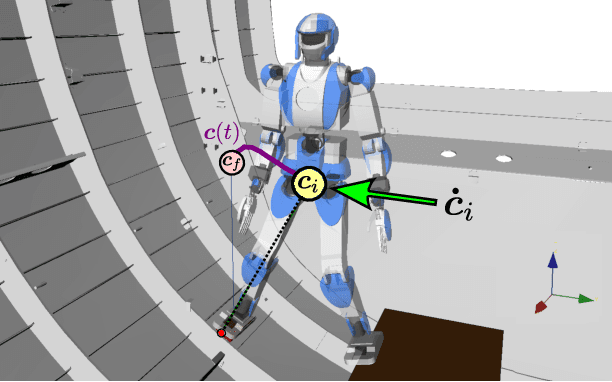
Capturability analysis of the linear inverted pendulum (LIP) model enabled walking with constrained height based on the capture point. We generalize this analysis to the variable-height inverted pendulum (VHIP) and show how it enables 3D walking over uneven terrains based on capture inputs. Thanks to a tailored optimization scheme, we can compute these inputs fast enough for real-time model predictive control. We implement this approach as open-source software and demonstrate it in dynamic simulations.
Balance control using both ZMP and COM height variations: A convex boundedness approach
Feb 27, 2018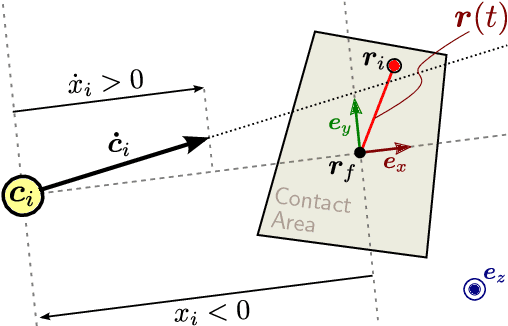
Developments for 3D control of the center of mass (CoM) of biped robots are currently located in two local minima: on the one hand, methods that allow CoM height variations but only work in the 2D sagittal plane; on the other hand, nonconvex direct transcriptions of centroidal dynamics that are delicate to handle. This paper presents an alternative that controls the CoM in 3D via an indirect transcription that is both low-dimensional and solvable fast enough for real-time control. The key to this development is the notion of boundedness condition, which quantifies the capturability of 3D CoM trajectories.