 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEAGERx: Graph-Based Framework for Sim2real Robot Learning
Jul 05, 2024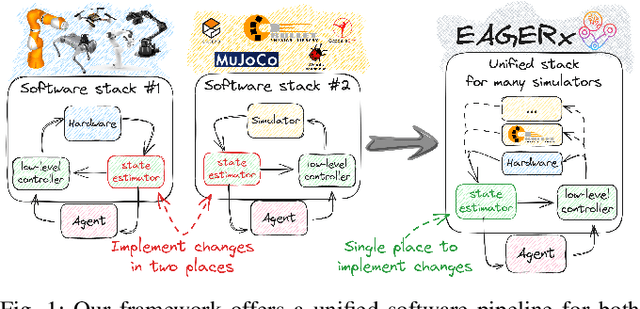
Sim2real, that is, the transfer of learned control policies from simulation to real world, is an area of growing interest in robotics due to its potential to efficiently handle complex tasks. The sim2real approach faces challenges due to mismatches between simulation and reality. These discrepancies arise from inaccuracies in modeling physical phenomena and asynchronous control, among other factors. To this end, we introduce EAGERx, a framework with a unified software pipeline for both real and simulated robot learning. It can support various simulators and aids in integrating state, action and time-scale abstractions to facilitate learning. EAGERx's integrated delay simulation, domain randomization features, and proposed synchronization algorithm contribute to narrowing the sim2real gap. We demonstrate (in the context of robot learning and beyond) the efficacy of EAGERx in accommodating diverse robotic systems and maintaining consistent simulation behavior. EAGERx is open source and its code is available at https://eagerx.readthedocs.io.
DeepKoCo: Efficient latent planning with an invariant Koopman representation
Nov 25, 2020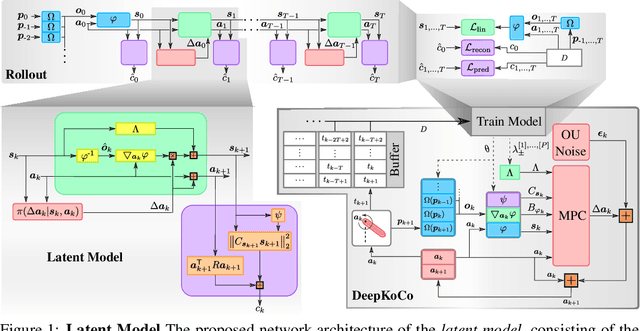

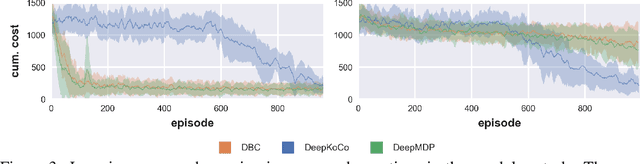
This paper presents DeepKoCo, a novel model-based agent that learns a latent Koopman representation from images. This representation allows DeepKoCo to plan efficiently using linear control methods, such as linear model predictive control. Compared to traditional agents, DeepKoCo is invariant to task-irrelevant dynamics, thanks to the use of a tailored lossy autoencoder network that allows DeepKoCo to learn latent dynamics that reconstruct and predict only observed costs, rather than all observed dynamics. As our results show, DeepKoCo achieves a similar final performance as traditional model-free methods on complex control tasks, while being considerably more robust to distractor dynamics, making the proposed agent more amenable for real-life applications.