 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeThe Z-axis, X-axis, Weight and Disambiguation Methods for Constructing Local Reference Frame in 3D Registration: An Evaluation
Apr 17, 2022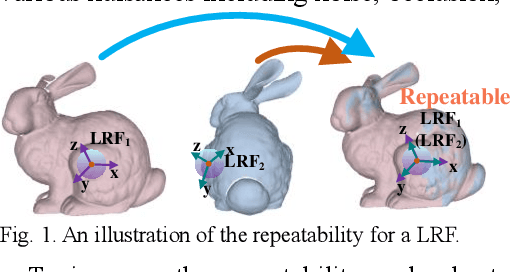
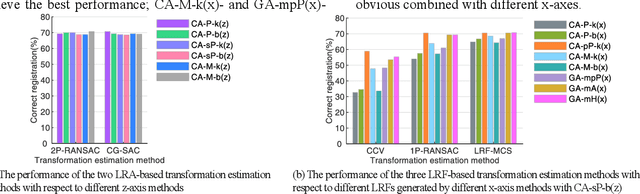
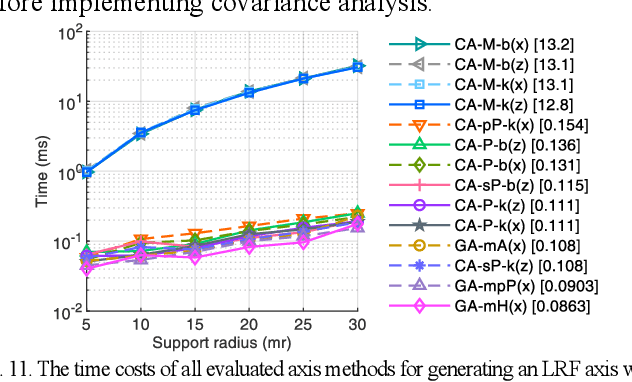
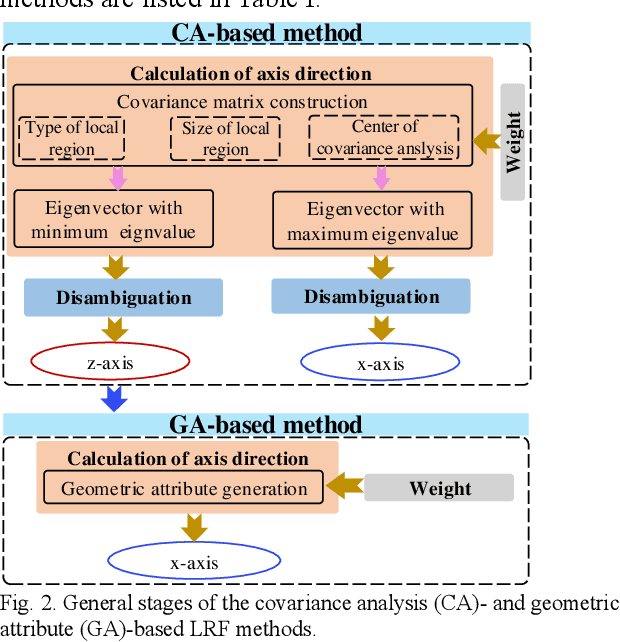
The local reference frame (LRF), as an independent coordinate system generated on a local 3D surface, is widely used in 3D local feature descriptor construction and 3D transformation estimation which are two key steps in the local method-based surface matching. There are numerous LRF methods have been proposed in literatures. In these methods, the x- and z-axis are commonly generated by different methods or strategies, and some x-axis methods are implemented on the basis of a z-axis being given. In addition, the weight and disambiguation methods are commonly used in these LRF methods. In existing evaluations of LRF, each LRF method is evaluated with a complete form. However, the merits and demerits of the z-axis, x-axis, weight and disambiguation methods in LRF construction are unclear. In this paper, we comprehensively analyze the z-axis, x-axis, weight and disambiguation methods in existing LRFs, and obtain six z-axis and eight x-axis, five weight and two disambiguation methods. The performance of these methods are comprehensively evaluated on six standard datasets with different application scenarios and nuisances. Considering the evaluation outcomes, the merits and demerits of different weight, disambiguation, z- and x-axis methods are analyzed and summarized. The experimental result also shows that some new designed LRF axes present superior performance compared with the state-of-the-art ones.
A Comprehensive Performance Evaluation for 3D Transformation Estimation Techniques
Jan 16, 2019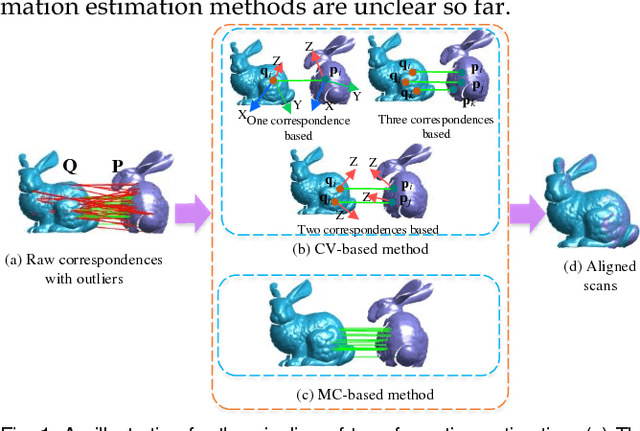
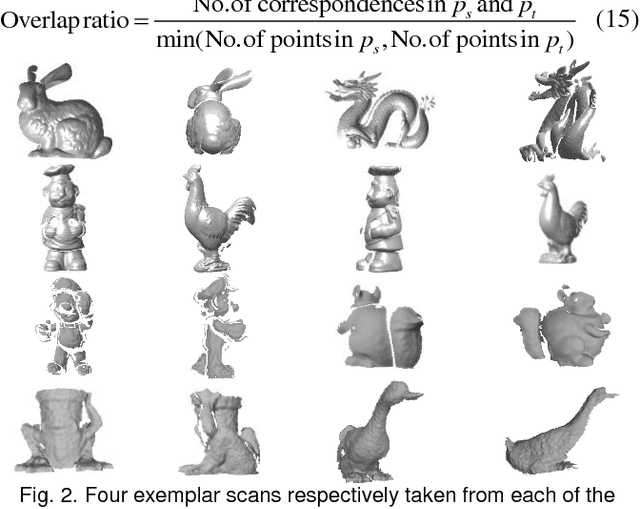

3D local feature extraction and matching is the basis for solving many tasks in the area of computer vision, such as 3D registration, modeling, recognition and retrieval. However, this process commonly draws into false correspondences, due to noise, limited features, occlusion, incomplete surface and etc. In order to estimate accurate transformation based on these corrupted correspondences, numerous transformation estimation techniques have been proposed. However, the merits, demerits and appropriate application for these methods are unclear owing to that no comprehensive evaluation for the performance of these methods has been conducted. This paper evaluates eleven state-of-the-art transformation estimation proposals on both descriptor based and synthetic correspondences. On descriptor based correspondences, several evaluation items (including the performance on different datasets, robustness to different overlap ratios and the performance of these technique combined with Iterative Closest Point (ICP), different local features and LRF/A techniques) of these methods are tested on four popular datasets acquired with different devices. On synthetic correspondences, the robustness of these methods to varying percentages of correct correspondences (PCC) is evaluated. In addition, we also evaluate the efficiencies of these methods. Finally, the merits, demerits and application guidance of these tested transformation estimation methods are summarized.
A Novel SDASS Descriptor for Fully Encoding the Information of 3D Local Surface
Jun 26, 2018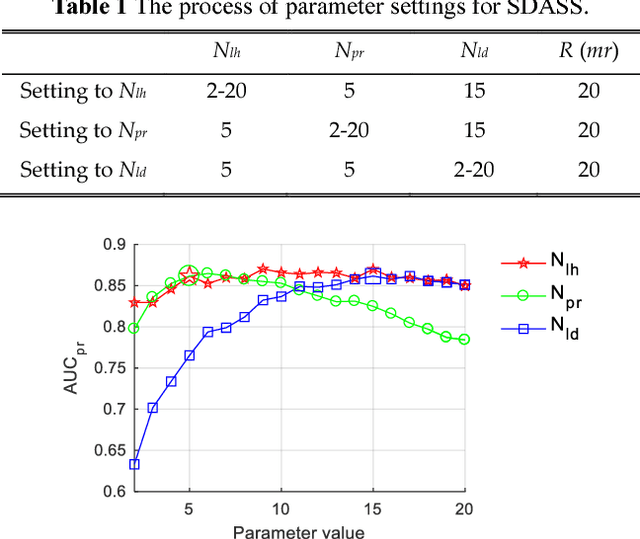
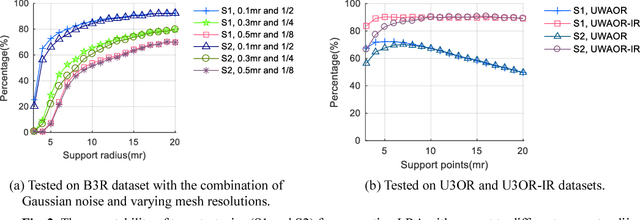
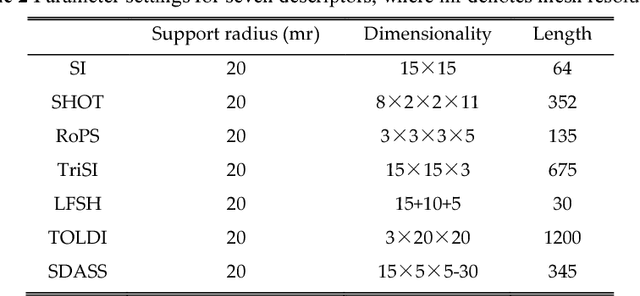
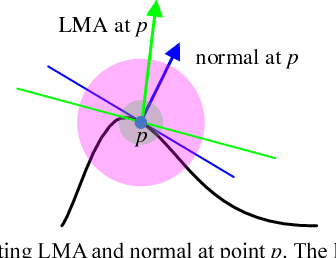
Local feature description is a fundamental yet challenging task in 3D computer vision. This paper proposes a novel descriptor, named Statistic of Deviation Angles on Subdivided Space (SDASS), of encoding geometrical and spatial information of local surface on Local Reference Axis (LRA). In terms of encoding geometrical information, considering that surface normals, which are usually used for encoding geometrical information of local surface, are vulnerable to various nuisances (e.g., noise, varying mesh resolutions etc.), we propose a robust geometrical attribute, called Local Minimum Axis (LMA), to replace the normals for generating the geometrical feature in our SDASS descriptor. For encoding spatial information, we use two spatial features for fully encoding the spatial information of a local surface based on LRA which usually presents high overall repeatability than Local Reference Axis (LRF). Besides, an improved LRA is proposed for increasing the robustness of our SDASS to noise and varying mesh resolutions. The performance of the SDASS descriptor is rigorously tested on four popular datasets. The results show that our descriptor has a high descriptiveness and strong robustness, and its performance outperform existing algorithms by a large margin. Finally, the proposed descriptor is applied to 3D registration. The accurate result further confirms the effectiveness of our SDASS method.