 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHybrid Reinforcement Learning-Based Eco-Driving Strategy for Connected and Automated Vehicles at Signalized Intersections
Jan 28, 2022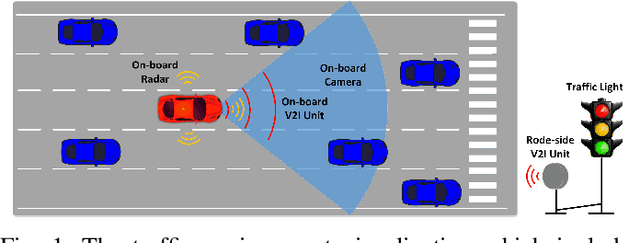
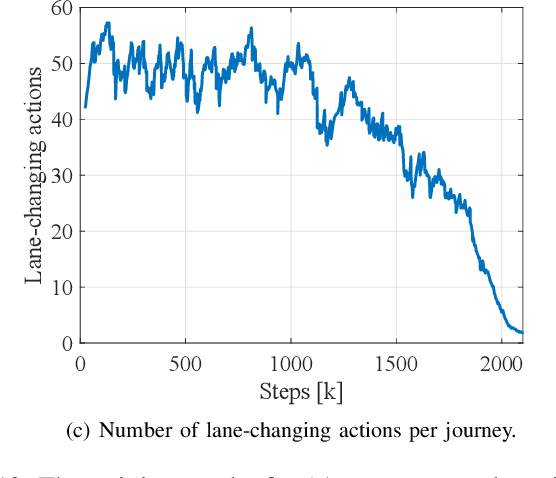
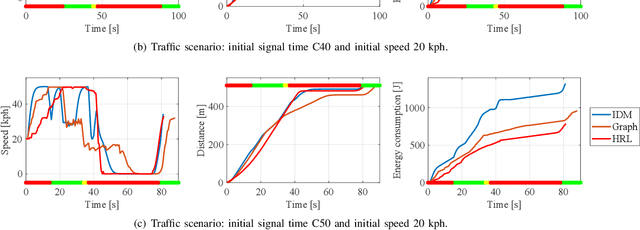
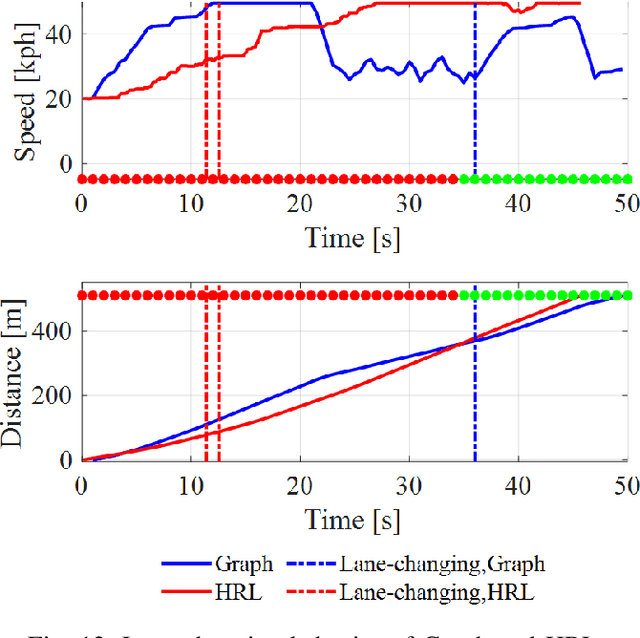
Taking advantage of both vehicle-to-everything (V2X) communication and automated driving technology, connected and automated vehicles are quickly becoming one of the transformative solutions to many transportation problems. However, in a mixed traffic environment at signalized intersections, it is still a challenging task to improve overall throughput and energy efficiency considering the complexity and uncertainty in the traffic system. In this study, we proposed a hybrid reinforcement learning (HRL) framework which combines the rule-based strategy and the deep reinforcement learning (deep RL) to support connected eco-driving at signalized intersections in mixed traffic. Vision-perceptive methods are integrated with vehicle-to-infrastructure (V2I) communications to achieve higher mobility and energy efficiency in mixed connected traffic. The HRL framework has three components: a rule-based driving manager that operates the collaboration between the rule-based policies and the RL policy; a multi-stream neural network that extracts the hidden features of vision and V2I information; and a deep RL-based policy network that generate both longitudinal and lateral eco-driving actions. In order to evaluate our approach, we developed a Unity-based simulator and designed a mixed-traffic intersection scenario. Moreover, several baselines were implemented to compare with our new design, and numerical experiments were conducted to test the performance of the HRL model. The experiments show that our HRL method can reduce energy consumption by 12.70% and save 11.75% travel time when compared with a state-of-the-art model-based Eco-Driving approach.
Deep Learning Based Motion Planning For Autonomous Vehicle Using Spatiotemporal LSTM Network
Mar 05, 2019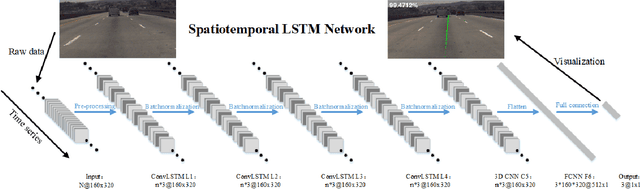
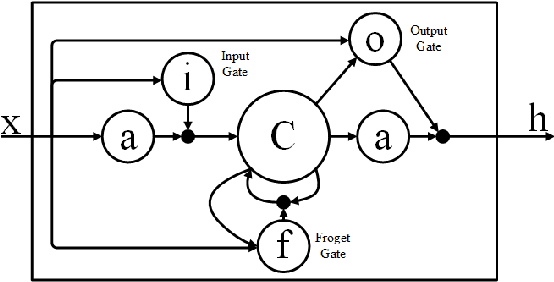
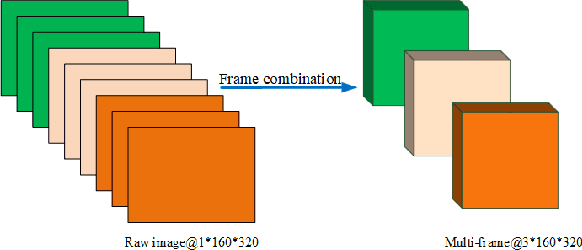
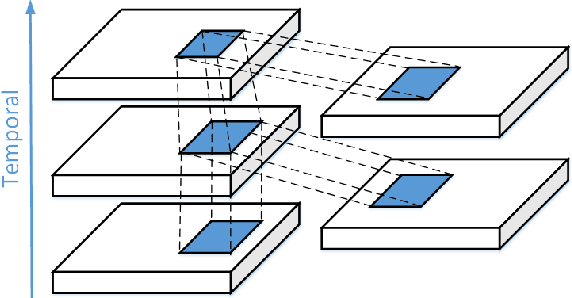
Motion Planning, as a fundamental technology of automatic navigation for the autonomous vehicle, is still an open challenging issue in the real-life traffic situation and is mostly applied by the model-based approaches. However, due to the complexity of the traffic situations and the uncertainty of the edge cases, it is hard to devise a general motion planning system for the autonomous vehicle. In this paper, we proposed a motion planning model based on deep learning (named as spatiotemporal LSTM network), which is able to generate a real-time reflection based on spatiotemporal information extraction. To be specific, the model based on spatiotemporal LSTM network has three main structure. Firstly, the Convolutional Long-short Term Memory (Conv-LSTM) is used to extract hidden features through sequential image data. Then, the 3D Convolutional Neural Network(3D-CNN) is applied to extract the spatiotemporal information from the multi-frame feature information. Finally, the fully connected neural networks are used to construct a control model for autonomous vehicle steering angle. The experiments demonstrated that the proposed method can generate a robust and accurate visual motion planning results for the autonomous vehicle.
Deep Reinforcement Learning Based High-level Driving Behavior Decision-making Model in Heterogeneous Traffic
Feb 26, 2019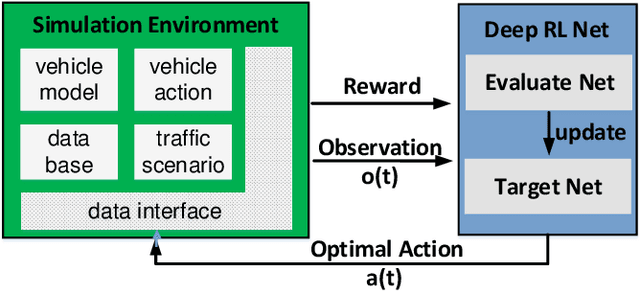
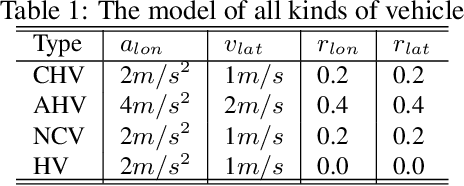
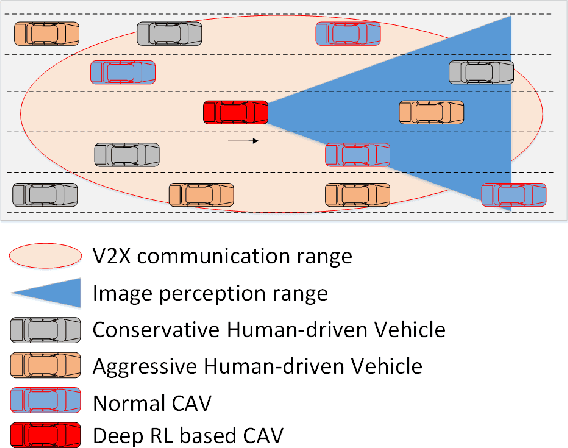
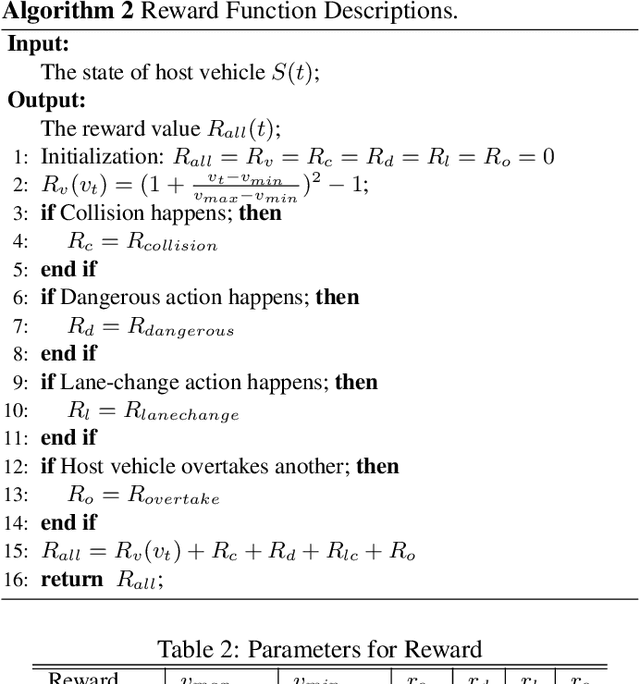
High-level driving behavior decision-making is an open-challenging problem for connected vehicle technology, especially in heterogeneous traffic scenarios. In this paper, a deep reinforcement learning based high-level driving behavior decision-making approach is proposed for connected vehicle in heterogeneous traffic situations. The model is composed of three main parts: a data preprocessor that maps hybrid data into a data format called hyper-grid matrix, a two-stream deep neural network that extracts the hidden features, and a deep reinforcement learning network that learns the optimal policy. Moreover, a simulation environment, which includes different heterogeneous traffic scenarios, is built to train and test the proposed method. The results demonstrate that the model has the capability to learn the optimal high-level driving policy such as driving fast through heterogeneous traffic without unnecessary lane changes. Furthermore, two separate models are used to compare with the proposed model, and the performances are analyzed in detail.