 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHybrid Reinforcement Learning-Based Eco-Driving Strategy for Connected and Automated Vehicles at Signalized Intersections
Paper and Code
Jan 28, 2022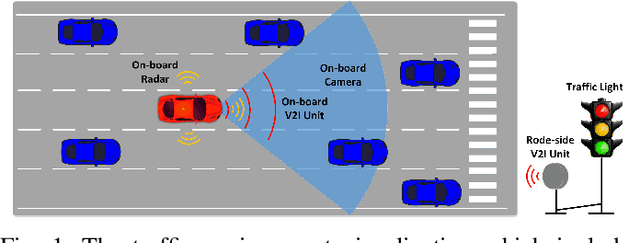
Taking advantage of both vehicle-to-everything (V2X) communication and automated driving technology, connected and automated vehicles are quickly becoming one of the transformative solutions to many transportation problems. However, in a mixed traffic environment at signalized intersections, it is still a challenging task to improve overall throughput and energy efficiency considering the complexity and uncertainty in the traffic system. In this study, we proposed a hybrid reinforcement learning (HRL) framework which combines the rule-based strategy and the deep reinforcement learning (deep RL) to support connected eco-driving at signalized intersections in mixed traffic. Vision-perceptive methods are integrated with vehicle-to-infrastructure (V2I) communications to achieve higher mobility and energy efficiency in mixed connected traffic. The HRL framework has three components: a rule-based driving manager that operates the collaboration between the rule-based policies and the RL policy; a multi-stream neural network that extracts the hidden features of vision and V2I information; and a deep RL-based policy network that generate both longitudinal and lateral eco-driving actions. In order to evaluate our approach, we developed a Unity-based simulator and designed a mixed-traffic intersection scenario. Moreover, several baselines were implemented to compare with our new design, and numerical experiments were conducted to test the performance of the HRL model. The experiments show that our HRL method can reduce energy consumption by 12.70% and save 11.75% travel time when compared with a state-of-the-art model-based Eco-Driving approach.