 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAutomatic Defect Detection in Sewer Network Using Deep Learning Based Object Detector
Apr 09, 2024

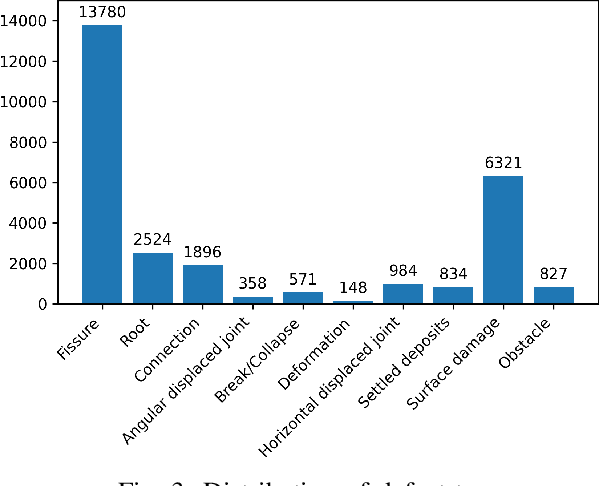

Maintaining sewer systems in large cities is important, but also time and effort consuming, because visual inspections are currently done manually. To reduce the amount of aforementioned manual work, defects within sewer pipes should be located and classified automatically. In the past, multiple works have attempted solving this problem using classical image processing, machine learning, or a combination of those. However, each provided solution only focus on detecting a limited set of defect/structure types, such as fissure, root, and/or connection. Furthermore, due to the use of hand-crafted features and small training datasets, generalization is also problematic. In order to overcome these deficits, a sizable dataset with 14.7 km of various sewer pipes were annotated by sewer maintenance experts in the scope of this work. On top of that, an object detector (EfficientDet-D0) was trained for automatic defect detection. From the result of several expermients, peculiar natures of defects in the context of object detection, which greatly effect annotation and training process, are found and discussed. At the end, the final detector was able to detect 83% of defects in the test set; out of the missing 17%, only 0.77% are very severe defects. This work provides an example of applying deep learning-based object detection into an important but quiet engineering field. It also gives some practical pointers on how to annotate peculiar "object", such as defects.
FisheyePP4AV: A privacy-preserving method for autonomous vehicles on fisheye camera images
Sep 07, 2023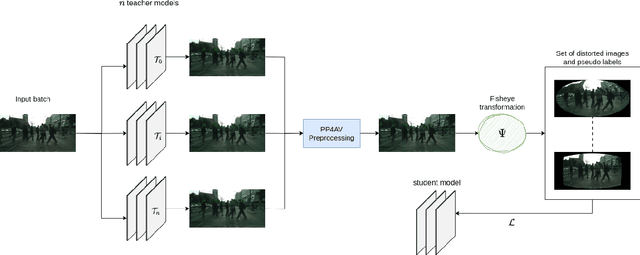
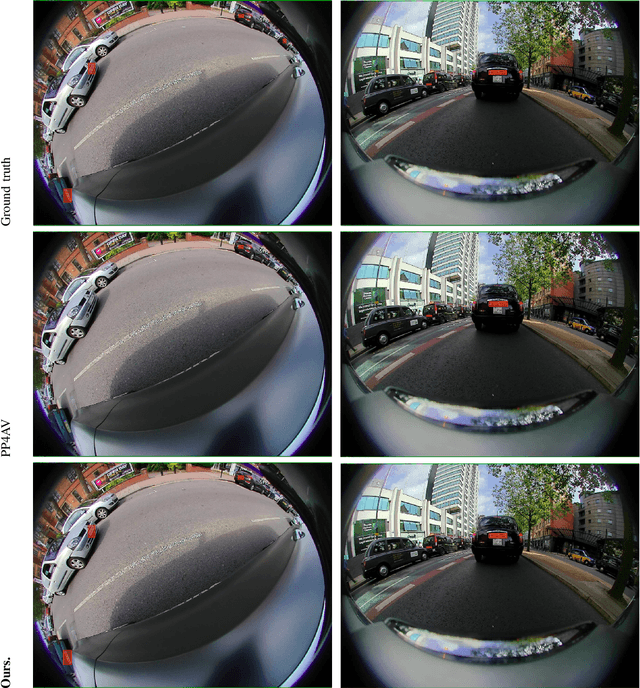
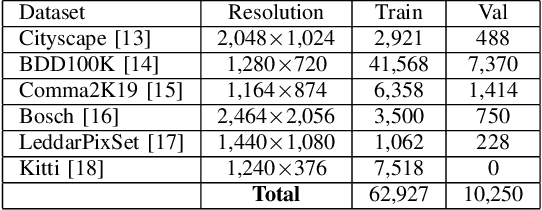
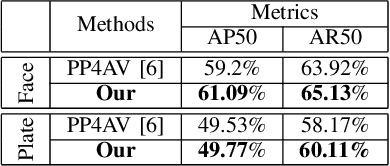
In many parts of the world, the use of vast amounts of data collected on public roadways for autonomous driving has increased. In order to detect and anonymize pedestrian faces and nearby car license plates in actual road-driving scenarios, there is an urgent need for effective solutions. As more data is collected, privacy concerns regarding it increase, including but not limited to pedestrian faces and surrounding vehicle license plates. Normal and fisheye cameras are the two common camera types that are typically mounted on collection vehicles. With complex camera distortion models, fisheye camera images were deformed in contrast to regular images. It causes computer vision tasks to perform poorly when using numerous deep learning models. In this work, we pay particular attention to protecting privacy while yet adhering to several laws for fisheye camera photos taken by driverless vehicles. First, we suggest a framework for extracting face and plate identification knowledge from several teacher models. Our second suggestion is to transform both the image and the label from a regular image to fisheye-like data using a varied and realistic fisheye transformation. Finally, we run a test using the open-source PP4AV dataset. The experimental findings demonstrated that our model outperformed baseline methods when trained on data from autonomous vehicles, even when the data were softly labeled. The implementation code is available at our github: https://github.com/khaclinh/FisheyePP4AV.