 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDEQ-MCL: Discrete-Event Queue-based Monte-Carlo Localization
Apr 22, 2024



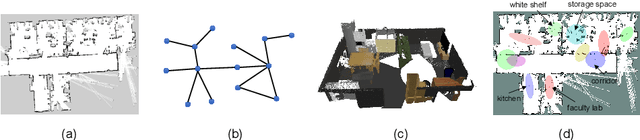
Spatial cognition in hippocampal formation is posited to play a crucial role in the development of self-localization techniques for robots. In this paper, we propose a self-localization approach, DEQ-MCL, based on the discrete event queue hypothesis associated with phase precession within the hippocampal formation. Our method effectively estimates the posterior distribution of states, encompassing both past, present, and future states that are organized as a queue. This approach enables the smoothing of the posterior distribution of past states using current observations and the weighting of the joint distribution by considering the feasibility of future states. Our findings indicate that the proposed method holds promise for augmenting self-localization performance in indoor environments.
Hippocampal formation-inspired probabilistic generative model
Mar 12, 2021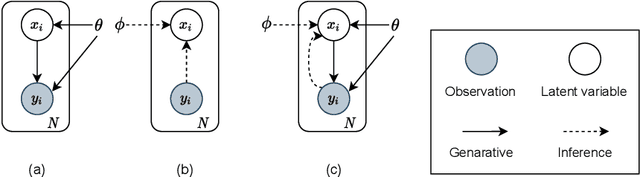

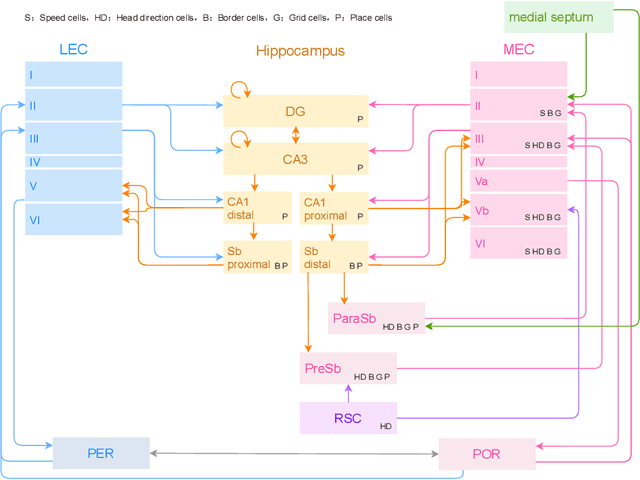
We constructed a hippocampal formation (HPF)-inspired probabilistic generative model (HPF-PGM) using the structure-constrained interface decomposition method. By modeling brain regions with PGMs, this model is positioned as a module that can be integrated as a whole-brain PGM. We discuss the relationship between simultaneous localization and mapping (SLAM) in robotics and the findings of HPF in neuroscience. Furthermore, we survey the modeling for HPF and various computational models, including brain-inspired SLAM, spatial concept formation, and deep generative models. The HPF-PGM is a computational model that is highly consistent with the anatomical structure and functions of the HPF, in contrast to typical conventional SLAM models. By referencing the brain, we suggest the importance of the integration of egocentric/allocentric information from the entorhinal cortex to the hippocampus and the use of discrete-event queues.