 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHippocampal formation-inspired probabilistic generative model
Paper and Code
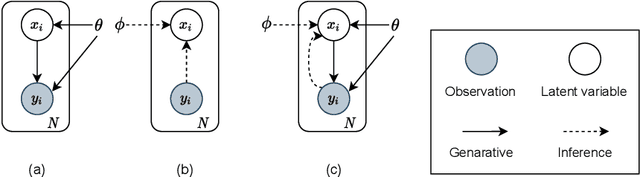

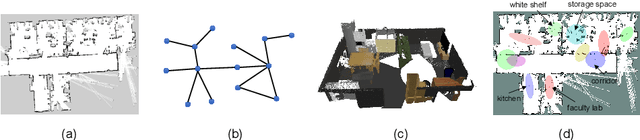
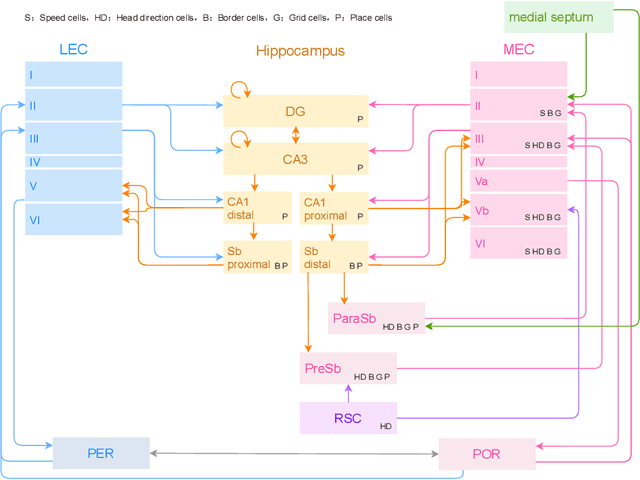
We constructed a hippocampal formation (HPF)-inspired probabilistic generative model (HPF-PGM) using the structure-constrained interface decomposition method. By modeling brain regions with PGMs, this model is positioned as a module that can be integrated as a whole-brain PGM. We discuss the relationship between simultaneous localization and mapping (SLAM) in robotics and the findings of HPF in neuroscience. Furthermore, we survey the modeling for HPF and various computational models, including brain-inspired SLAM, spatial concept formation, and deep generative models. The HPF-PGM is a computational model that is highly consistent with the anatomical structure and functions of the HPF, in contrast to typical conventional SLAM models. By referencing the brain, we suggest the importance of the integration of egocentric/allocentric information from the entorhinal cortex to the hippocampus and the use of discrete-event queues.