 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to Edgeira_laser_tools: a ROS LaserScan manipulation toolbox
Nov 04, 2014
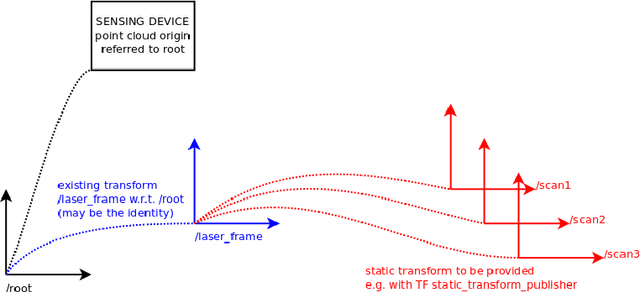

Laser scanners are sensors of widespread use in robotic applications. Under the Robot Operating System (ROS) the information generated by laser scanners can be conveyed by either LaserScan messages or in the form of PointClouds. Many publicly available algorithms (mapping, localization, navigation, etc.) rely on LaserScan messages, yet a tool for handling multiple lasers, merging their measurements, or to generate generic LaserScan messages from PointClouds, is not available. This report describes two tools, in the form of ROS nodes, which we release as open source under the BSD license, which allow to either merge multiple single-plane laser scans or to generate virtual laser scans from a point cloud. A short tutorial, along with the main advantages and limitations of these tools are presented.