 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCombating Mode Collapse in GAN training: An Empirical Analysis using Hessian Eigenvalues
Dec 17, 2020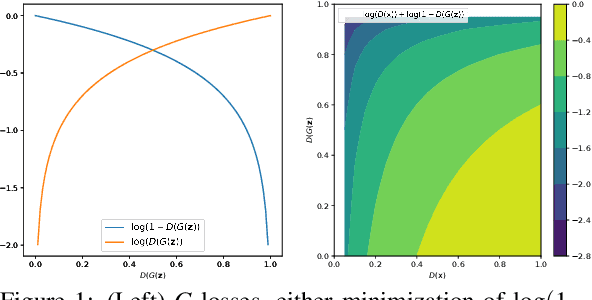
Generative adversarial networks (GANs) provide state-of-the-art results in image generation. However, despite being so powerful, they still remain very challenging to train. This is in particular caused by their highly non-convex optimization space leading to a number of instabilities. Among them, mode collapse stands out as one of the most daunting ones. This undesirable event occurs when the model can only fit a few modes of the data distribution, while ignoring the majority of them. In this work, we combat mode collapse using second-order gradient information. To do so, we analyse the loss surface through its Hessian eigenvalues, and show that mode collapse is related to the convergence towards sharp minima. In particular, we observe how the eigenvalues of the $G$ are directly correlated with the occurrence of mode collapse. Finally, motivated by these findings, we design a new optimization algorithm called nudged-Adam (NuGAN) that uses spectral information to overcome mode collapse, leading to empirically more stable convergence properties.
GradVis: Visualization and Second Order Analysis of Optimization Surfaces during the Training of Deep Neural Networks
Sep 27, 2019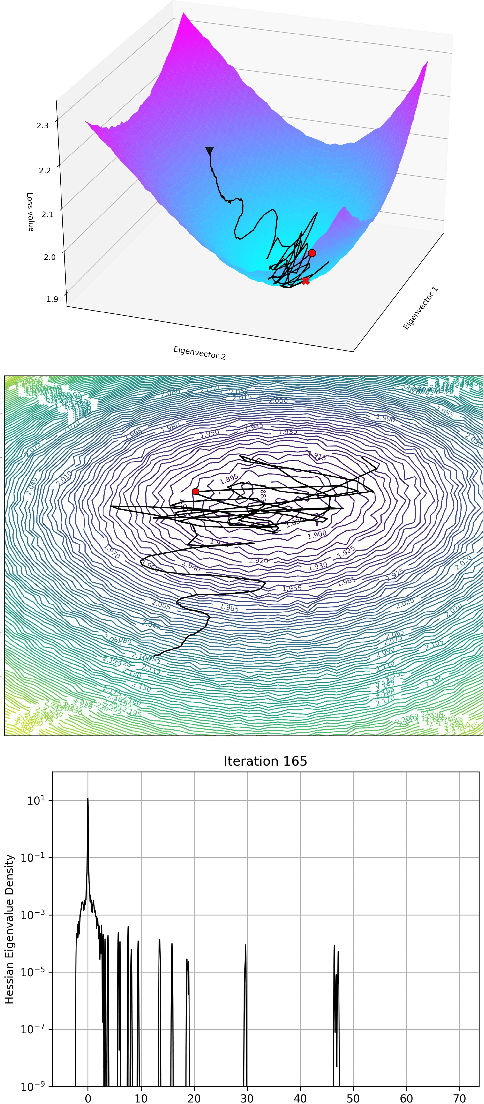



Current training methods for deep neural networks boil down to very high dimensional and non-convex optimization problems which are usually solved by a wide range of stochastic gradient descent methods. While these approaches tend to work in practice, there are still many gaps in the theoretical understanding of key aspects like convergence and generalization guarantees, which are induced by the properties of the optimization surface (loss landscape). In order to gain deeper insights, a number of recent publications proposed methods to visualize and analyze the optimization surfaces. However, the computational cost of these methods are very high, making it hardly possible to use them on larger networks. In this paper, we present the GradVis Toolbox, an open source library for efficient and scalable visualization and analysis of deep neural network loss landscapes in Tensorflow and PyTorch. Introducing more efficient mathematical formulations and a novel parallelization scheme, GradVis allows to plot 2d and 3d projections of optimization surfaces and trajectories, as well as high resolution second order gradient information for large networks.