 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRisk assessment and mitigation of e-scooter crashes with naturalistic driving data
Dec 24, 2022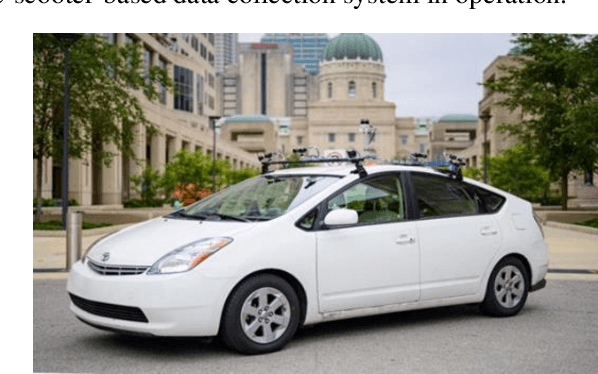


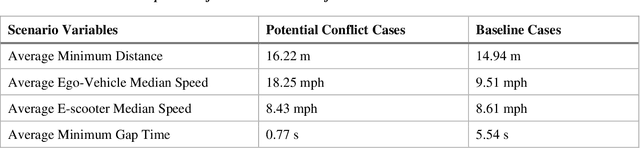
Recently, e-scooter-involved crashes have increased significantly but little information is available about the behaviors of on-road e-scooter riders. Most existing e-scooter crash research was based on retrospectively descriptive media reports, emergency room patient records, and crash reports. This paper presents a naturalistic driving study with a focus on e-scooter and vehicle encounters. The goal is to quantitatively measure the behaviors of e-scooter riders in different encounters to help facilitate crash scenario modeling, baseline behavior modeling, and the potential future development of in-vehicle mitigation algorithms. The data was collected using an instrumented vehicle and an e-scooter rider wearable system, respectively. A three-step data analysis process is developed. First, semi-automatic data labeling extracts e-scooter rider images and non-rider human images in similar environments to train an e-scooter-rider classifier. Then, a multi-step scene reconstruction pipeline generates vehicle and e-scooter trajectories in all encounters. The final step is to model e-scooter rider behaviors and e-scooter-vehicle encounter scenarios. A total of 500 vehicle to e-scooter interactions are analyzed. The variables pertaining to the same are also discussed in this paper.
SceNDD: A Scenario-based Naturalistic Driving Dataset
Dec 22, 2022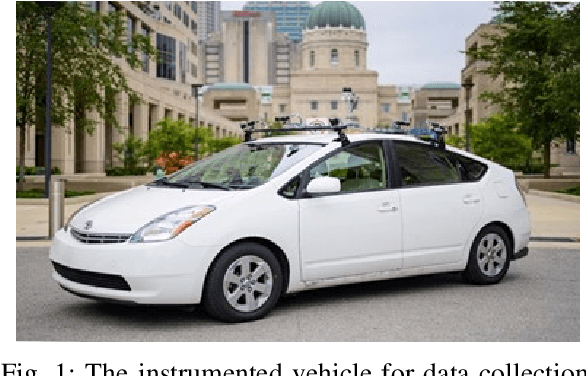
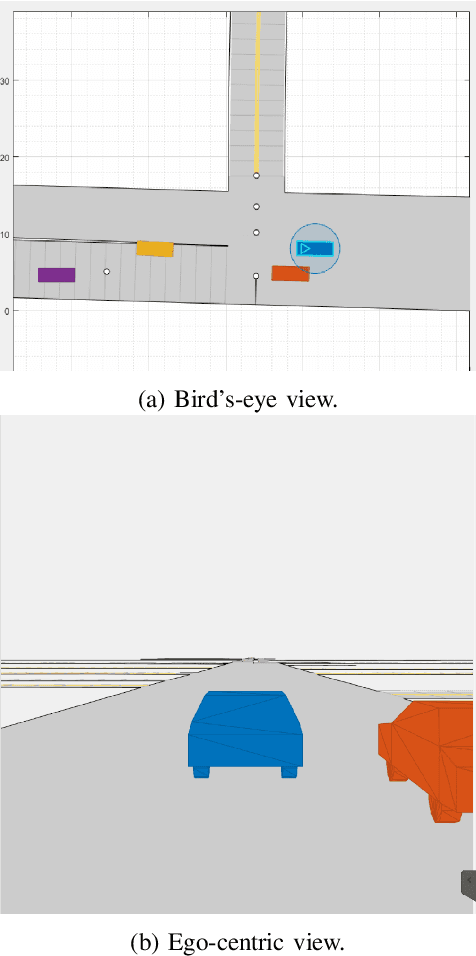
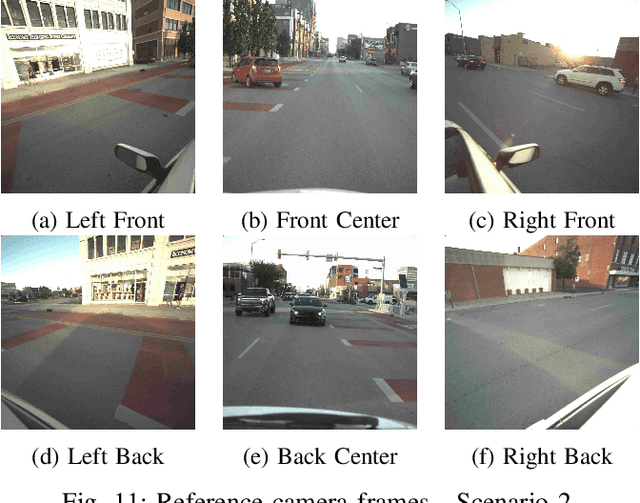
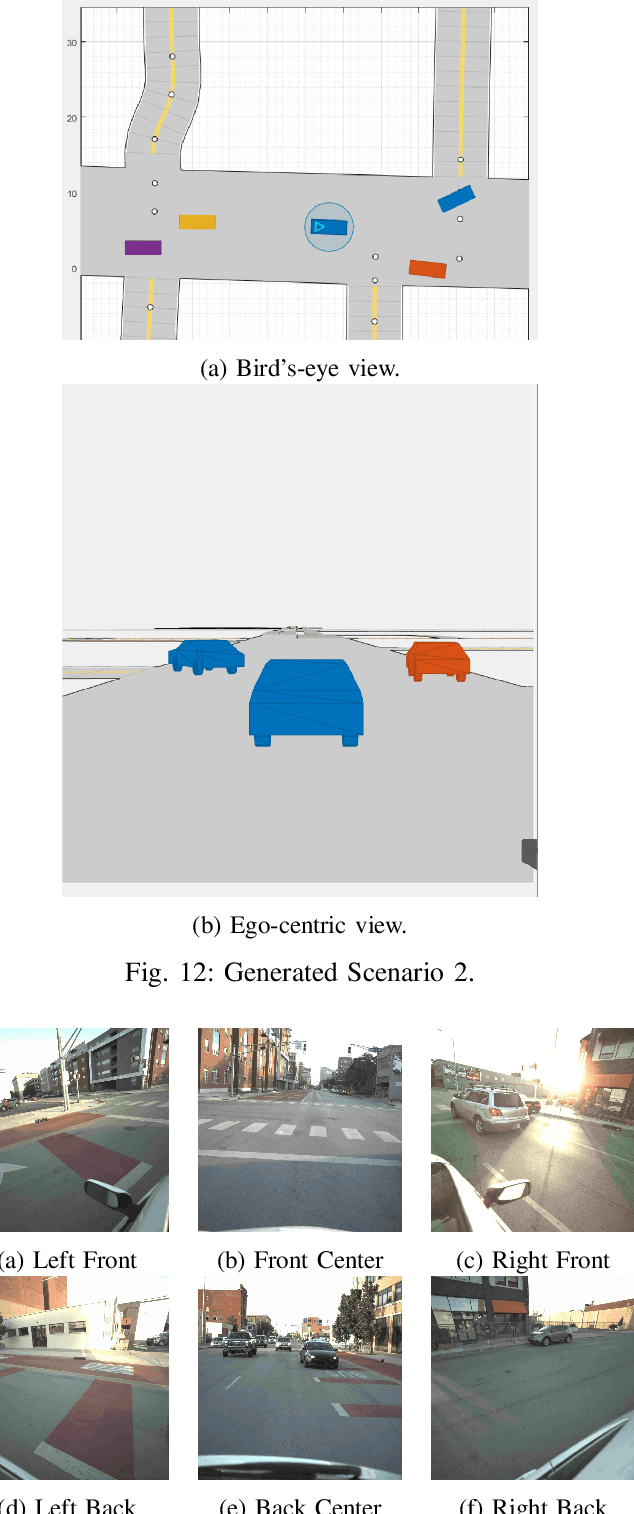
In this paper, we propose SceNDD: a scenario-based naturalistic driving dataset that is built upon data collected from an instrumented vehicle in downtown Indianapolis. The data collection was completed in 68 driving sessions with different drivers, where each session lasted about 20--40 minutes. The main goal of creating this dataset is to provide the research community with real driving scenarios that have diverse trajectories and driving behaviors. The dataset contains ego-vehicle's waypoints, velocity, yaw angle, as well as non-ego actor's waypoints, velocity, yaw angle, entry-time, and exit-time. Certain flexibility is provided to users so that actors, sensors, lanes, roads, and obstacles can be added to the existing scenarios. We used a Joint Probabilistic Data Association (JPDA) tracker to detect non-ego vehicles on the road. We present some preliminary results of the proposed dataset and a few applications associated with it. The complete dataset is expected to be released by early 2023.
A Wearable Data Collection System for Studying Micro-Level E-Scooter Behavior in Naturalistic Road Environment
Dec 22, 2022



As one of the most popular micro-mobility options, e-scooters are spreading in hundreds of big cities and college towns in the US and worldwide. In the meantime, e-scooters are also posing new challenges to traffic safety. In general, e-scooters are suggested to be ridden in bike lanes/sidewalks or share the road with cars at the maximum speed of about 15-20 mph, which is more flexible and much faster than the pedestrains and bicyclists. These features make e-scooters challenging for human drivers, pedestrians, vehicle active safety modules, and self-driving modules to see and interact. To study this new mobility option and address e-scooter riders' and other road users' safety concerns, this paper proposes a wearable data collection system for investigating the micro-level e-Scooter motion behavior in a Naturalistic road environment. An e-Scooter-based data acquisition system has been developed by integrating LiDAR, cameras, and GPS using the robot operating system (ROS). Software frameworks are developed to support hardware interfaces, sensor operation, sensor synchronization, and data saving. The integrated system can collect data continuously for hours, meeting all the requirements including calibration accuracy and capability of collecting the vehicle and e-Scooter encountering data.