 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeShape and Spatially-Varying Reflectance Estimation From Virtual Exemplars
Sep 21, 2016
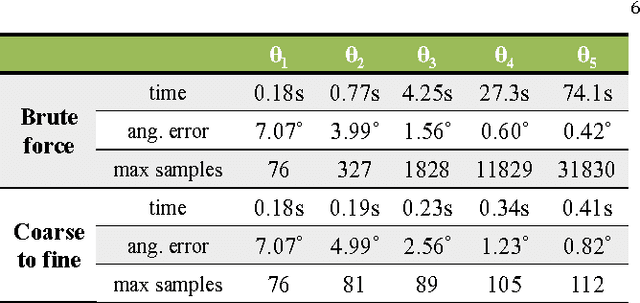
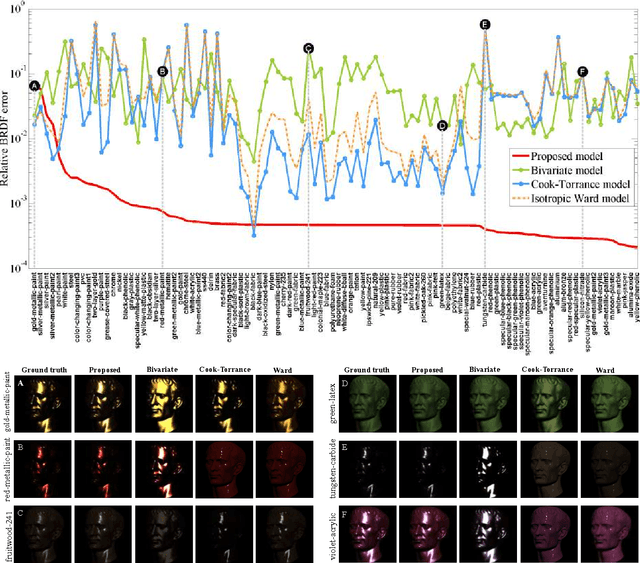

This paper addresses the problem of estimating the shape of objects that exhibit spatially-varying reflectance. We assume that multiple images of the object are obtained under a fixed view-point and varying illumination, i.e., the setting of photometric stereo. At the core of our techniques is the assumption that the BRDF at each pixel lies in the non-negative span of a known BRDF dictionary.This assumption enables a per-pixel surface normal and BRDF estimation framework that is computationally tractable and requires no initialization in spite of the underlying problem being non-convex. Our estimation framework first solves for the surface normal at each pixel using a variant of example-based photometric stereo. We design an efficient multi-scale search strategy for estimating the surface normal and subsequently, refine this estimate using a gradient descent procedure. Given the surface normal estimate, we solve for the spatially-varying BRDF by constraining the BRDF at each pixel to be in the span of the BRDF dictionary, here, we use additional priors to further regularize the solution. A hallmark of our approach is that it does not require iterative optimization techniques nor the need for careful initialization, both of which are endemic to most state-of-the-art techniques. We showcase the performance of our technique on a wide range of simulated and real scenes where we outperform competing methods.
Compressive Acquisition of Dynamic Scenes
Jun 26, 2013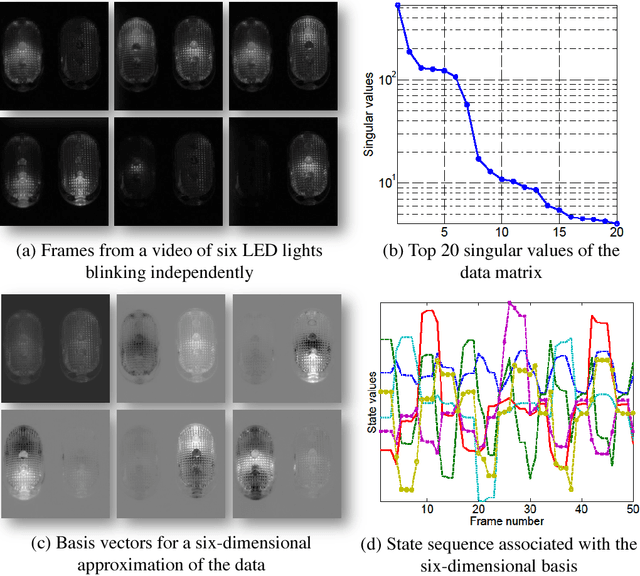
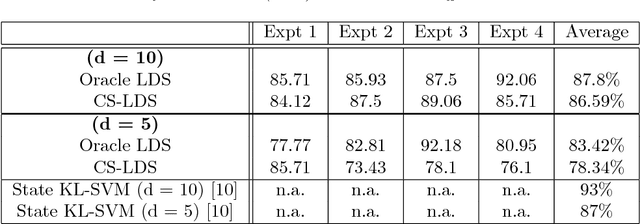
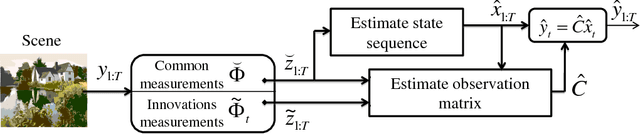
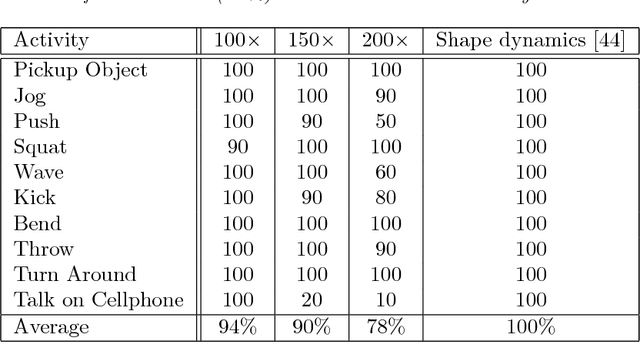
Compressive sensing (CS) is a new approach for the acquisition and recovery of sparse signals and images that enables sampling rates significantly below the classical Nyquist rate. Despite significant progress in the theory and methods of CS, little headway has been made in compressive video acquisition and recovery. Video CS is complicated by the ephemeral nature of dynamic events, which makes direct extensions of standard CS imaging architectures and signal models difficult. In this paper, we develop a new framework for video CS for dynamic textured scenes that models the evolution of the scene as a linear dynamical system (LDS). This reduces the video recovery problem to first estimating the model parameters of the LDS from compressive measurements, and then reconstructing the image frames. We exploit the low-dimensional dynamic parameters (the state sequence) and high-dimensional static parameters (the observation matrix) of the LDS to devise a novel compressive measurement strategy that measures only the dynamic part of the scene at each instant and accumulates measurements over time to estimate the static parameters. This enables us to lower the compressive measurement rate considerably. We validate our approach with a range of experiments involving both video recovery, sensing hyper-spectral data, and classification of dynamic scenes from compressive data. Together, these applications demonstrate the effectiveness of the approach.